
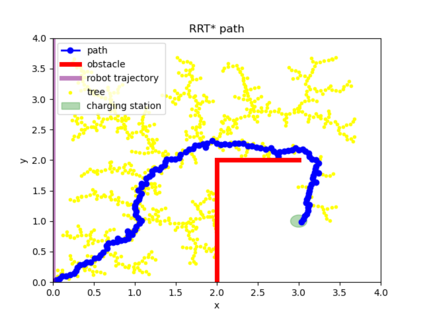
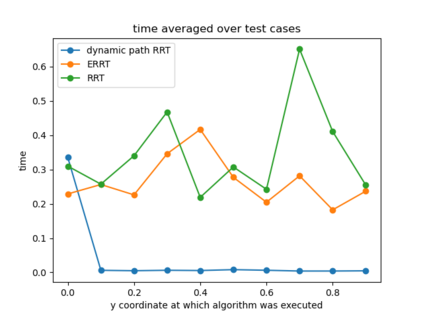
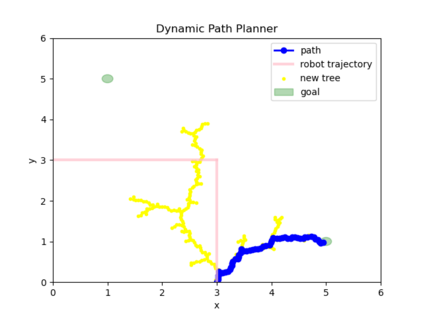
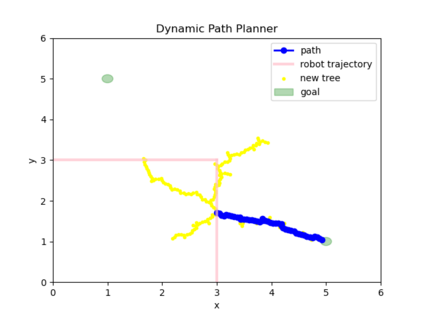
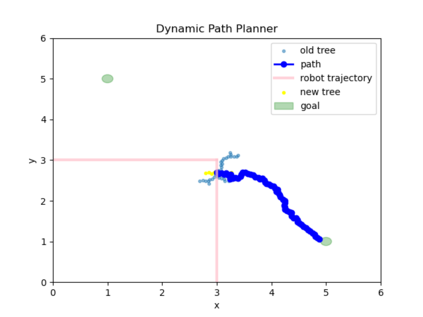
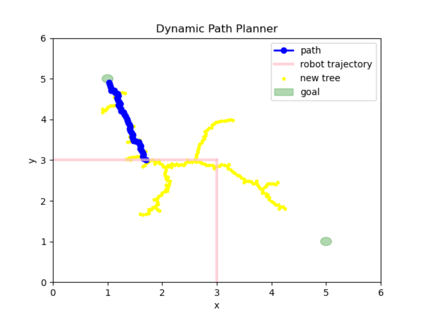
Mobile robots often have limited battery life and need to recharge periodically. This paper presents an RRT- based path-planning algorithm that addresses battery power management. A path is generated continuously from the robot's current position to its recharging station. The robot decides if a recharge is needed based on the energy required to travel on that path and the robot's current power. RRT* is used to generate the first path, and then subsequent paths are made using information from previous trees. Finally, the presented algorithm was compared with Extended Rate Random Tree (ERRT) algorithm
翻译:暂无翻译



相关内容

专知会员服务
34+阅读 · 2019年10月18日
专知会员服务
36+阅读 · 2019年10月17日
Arxiv
0+阅读 · 2023年12月17日
Arxiv
0+阅读 · 2023年12月17日
Arxiv
0+阅读 · 2023年12月13日
Arxiv
11+阅读 · 2021年9月3日
Arxiv
18+阅读 · 2019年9月25日
相关主题



相关VIP内容
专知会员服务
34+阅读 · 2019年10月18日
专知会员服务
36+阅读 · 2019年10月17日
相关资讯
相关论文
Arxiv
0+阅读 · 2023年12月17日
Arxiv
0+阅读 · 2023年12月17日
Arxiv
0+阅读 · 2023年12月13日
Arxiv
11+阅读 · 2021年9月3日
Arxiv
18+阅读 · 2019年9月25日