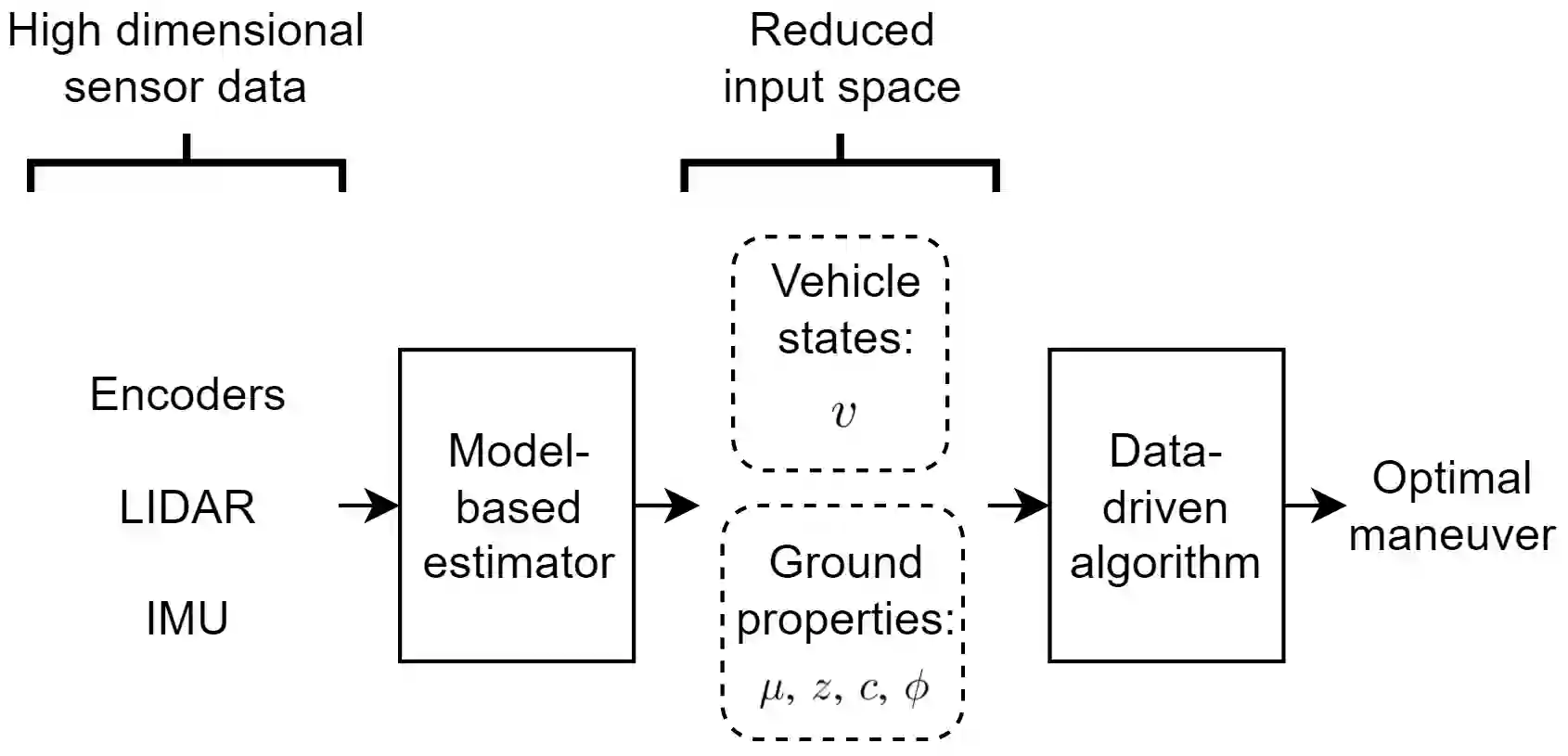
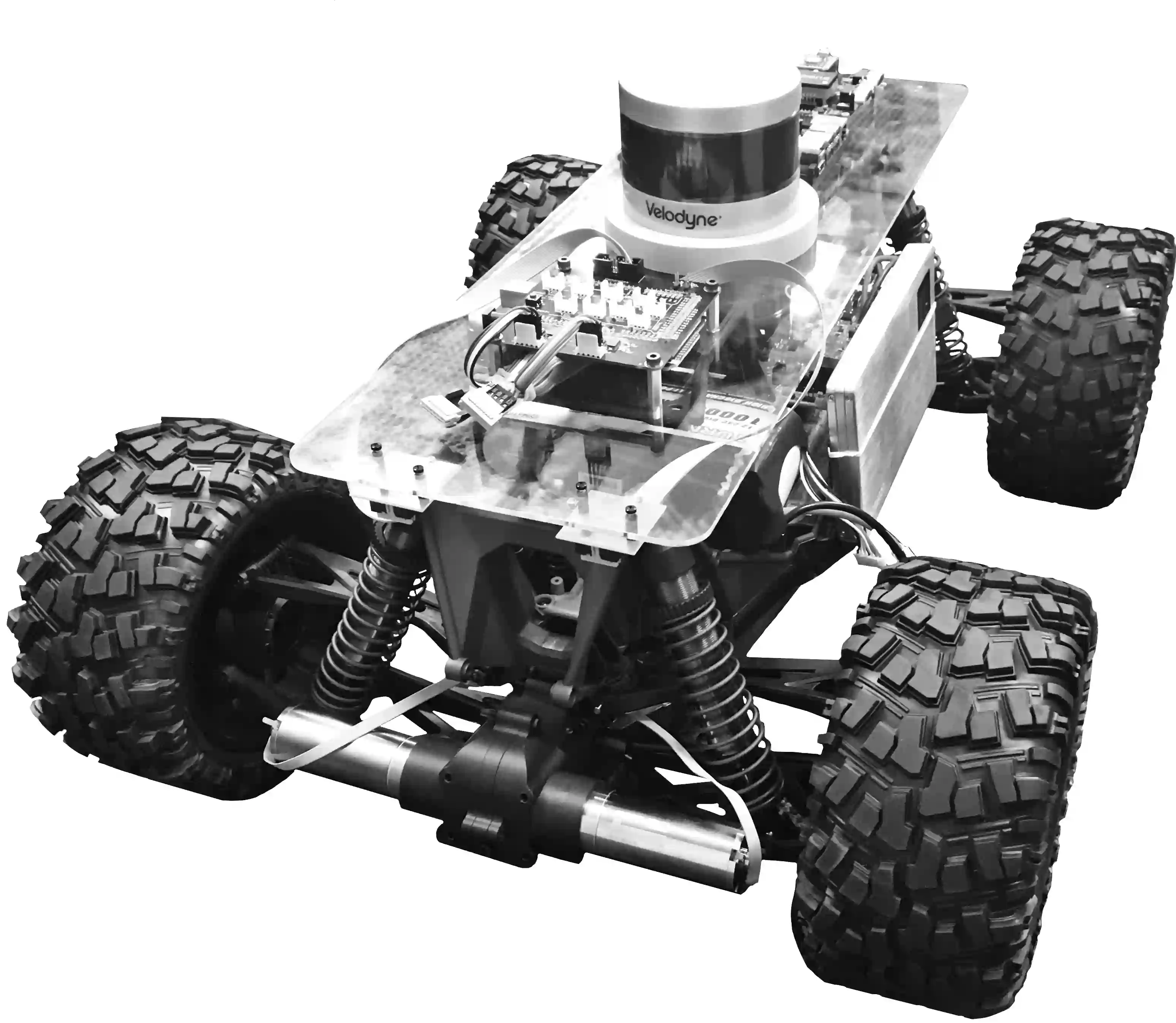
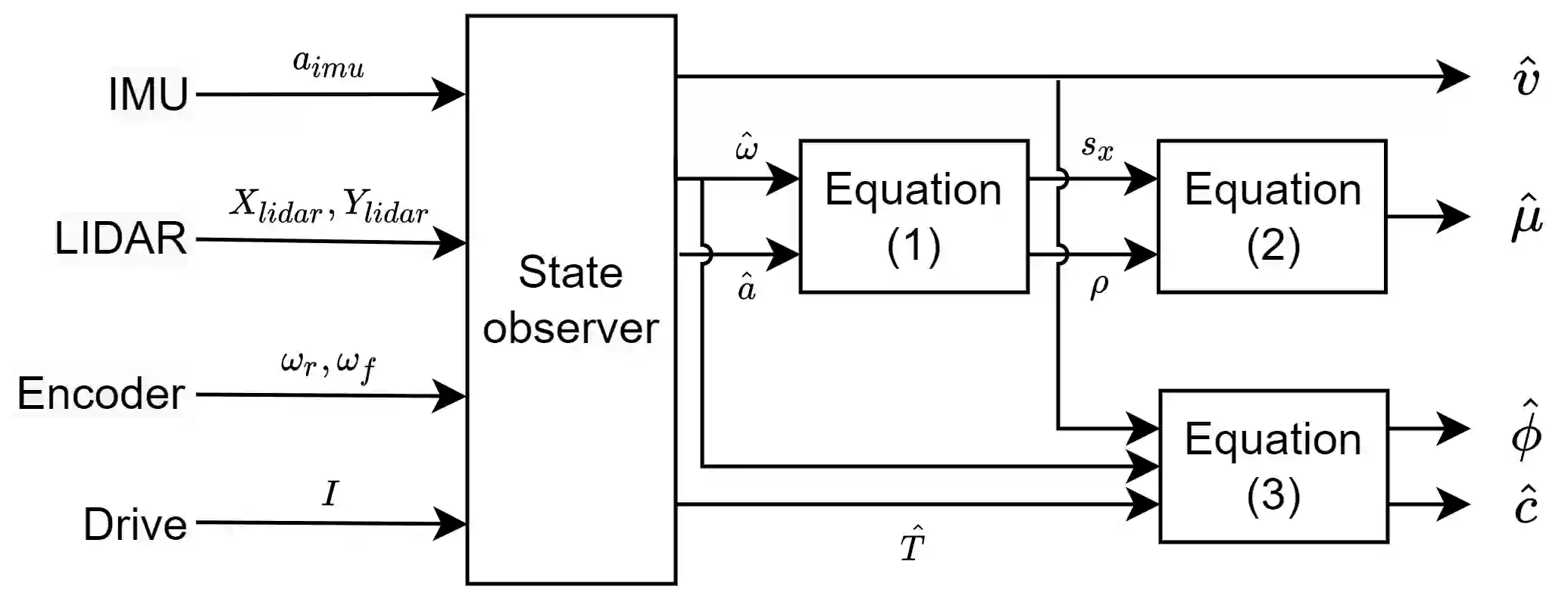
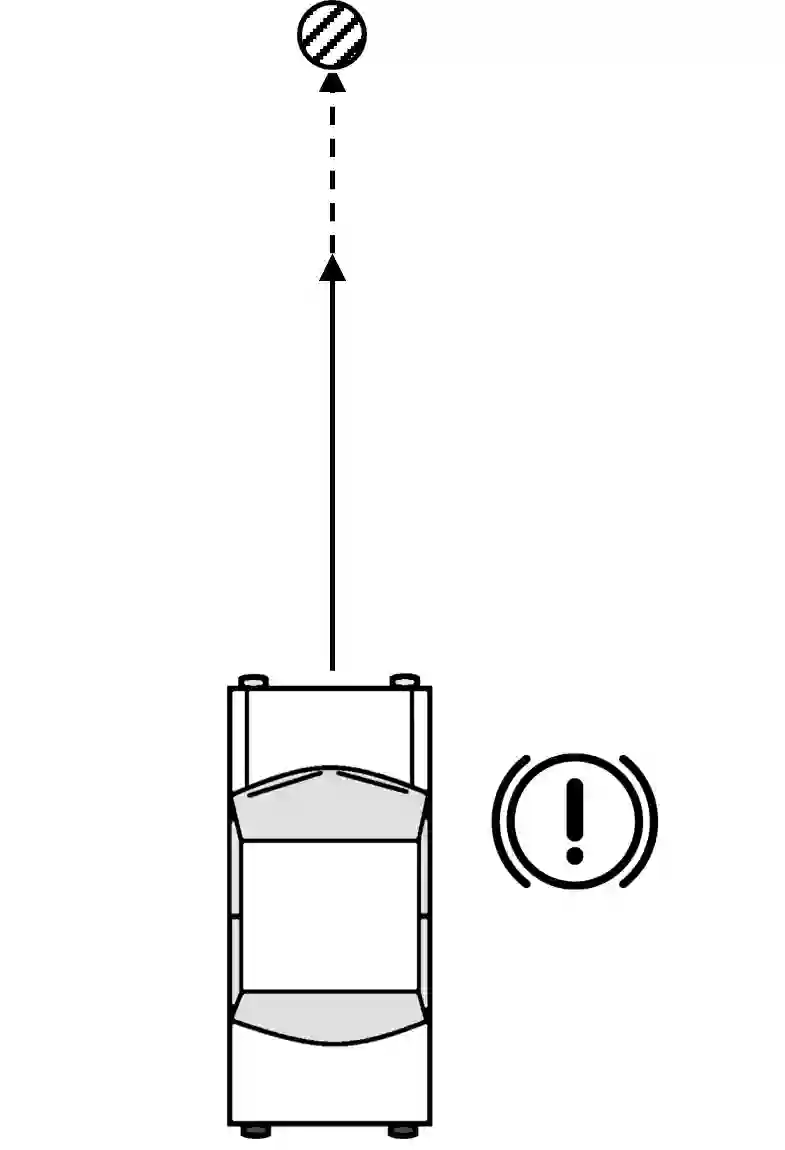
Winter conditions, characterized by the presence of ice and snow on the ground, are more likely to lead to road accidents. This paper presents an experimental proof of concept of a collision avoidance algorithm for vehicles evolving in low adhesion conditions, implemented on a 1/5th scale car platform. In the proposed approach, a model-based estimator first processes the high-dimensional sensors data of the IMU, LIDAR and encoders to estimate physically relevant vehicle and ground conditions parameters such as the inertial velocity of the vehicle $v$, the friction coefficient $\mu$, the cohesion $c$ and the internal shear angle $\phi$. Then, a data-driven predictor is trained to predict the optimal maneuver to perform in the situation characterized by the estimated parameters. Experiments show that it is possible to 1) produce a real-time estimate of the relevant ground parameters, and 2) determine an optimal collision avoidance maneuver based on the estimated parameters.
翻译:以地面存在冰雪为特征的冬季条件更可能导致道路事故,本文实验性地证明在1/5级汽车平台上实施的低粘合条件下演变的车辆避免碰撞算法概念,在拟议办法中,模型估算器首先处理IMU、LIDAR和编码器的高维传感器数据,以估计车辆的惯性速度(v美元)、摩擦系数($mu美元)、凝固值($c$)和内部剪切角($\phi$)等与物理有关的车辆和地面条件参数。然后,对数据驱动预测器进行了培训,以预测在估计参数特点情况下进行的最佳操作。实验表明,有可能(1) 实时估计有关地面参数,(2) 根据估计参数确定最佳避免碰撞的动作。