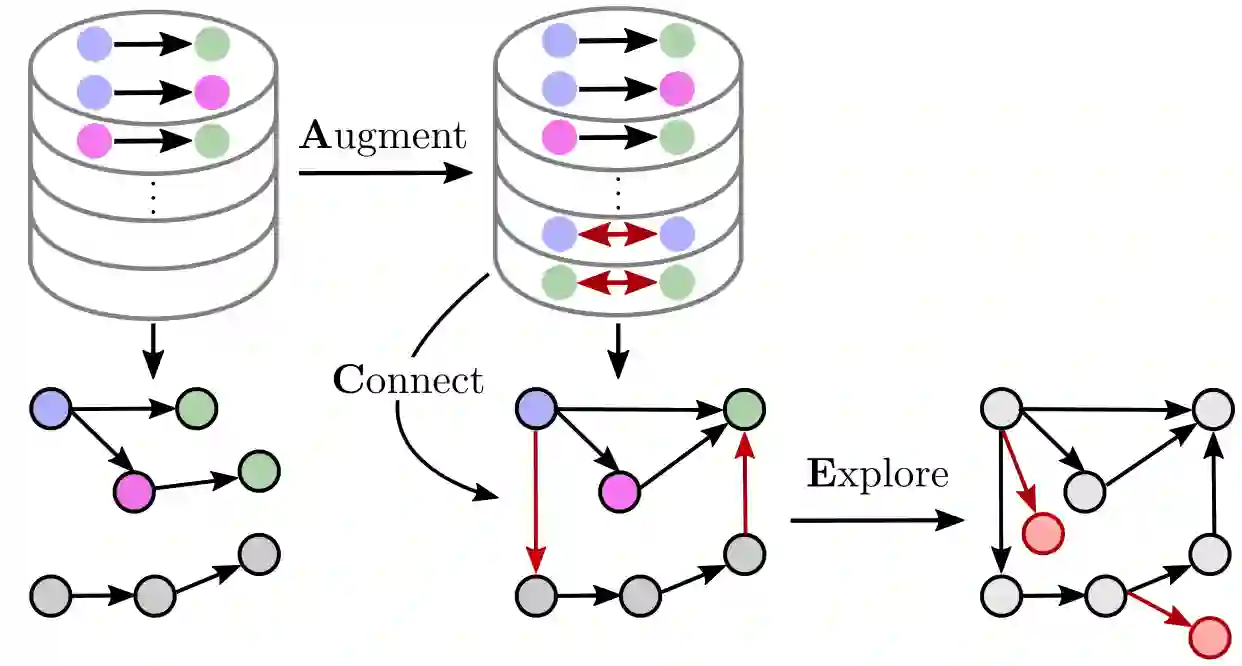
Visual action planning particularly excels in applications where the state of the system cannot be computed explicitly, such as manipulation of deformable objects, as it enables planning directly from raw images. Even though the field has been significantly accelerated by deep learning techniques, a crucial requirement for their success is the availability of a large amount of data. In this work, we propose the Augment-Connect-Explore (ACE) paradigm to enable visual action planning in cases of data scarcity. We build upon the Latent Space Roadmap (LSR) framework which performs planning with a graph built in a low dimensional latent space. In particular, ACE is used to i) Augment the available training dataset by autonomously creating new pairs of datapoints, ii) create new unobserved Connections among representations of states in the latent graph, and iii) Explore new regions of the latent space in a targeted manner. We validate the proposed approach on both simulated box stacking and real-world folding task showing the applicability for rigid and deformable object manipulation tasks, respectively.
翻译:在无法明确计算系统状态的应用程序中,视觉行动规划特别优异,例如操纵变形物体,因为它能够直接从原始图像中进行规划。尽管深层学习技术大大加快了实地速度,但成功的关键要求是提供大量数据。在这项工作中,我们提议扩大-连接-探索(ACE)范式,以便在数据匮乏的情况下进行视觉行动规划。我们以低维潜层空间的图示进行规划的冷层空间路线图框架为基础。特别是,ACE用来(i)通过自主创建新的数据点组合来扩大现有培训数据集,(ii)在潜在图示中的国家代表之间建立新的未观测到的连接,以及(iii)以有针对性的方式探索潜在空间的新区域。我们验证了拟议的模拟堆放箱和真实世界折叠作业方法,分别显示对僵硬和变形物体操纵任务的适用性。