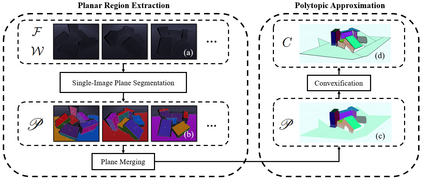
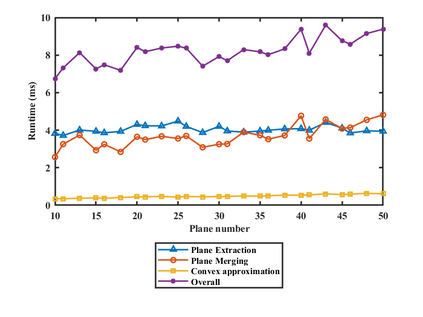
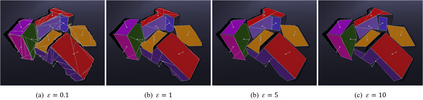
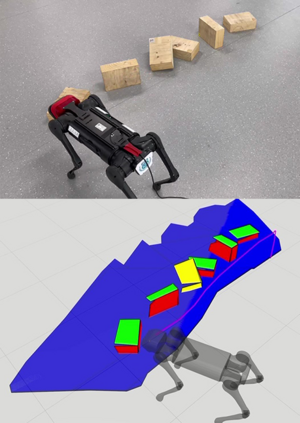
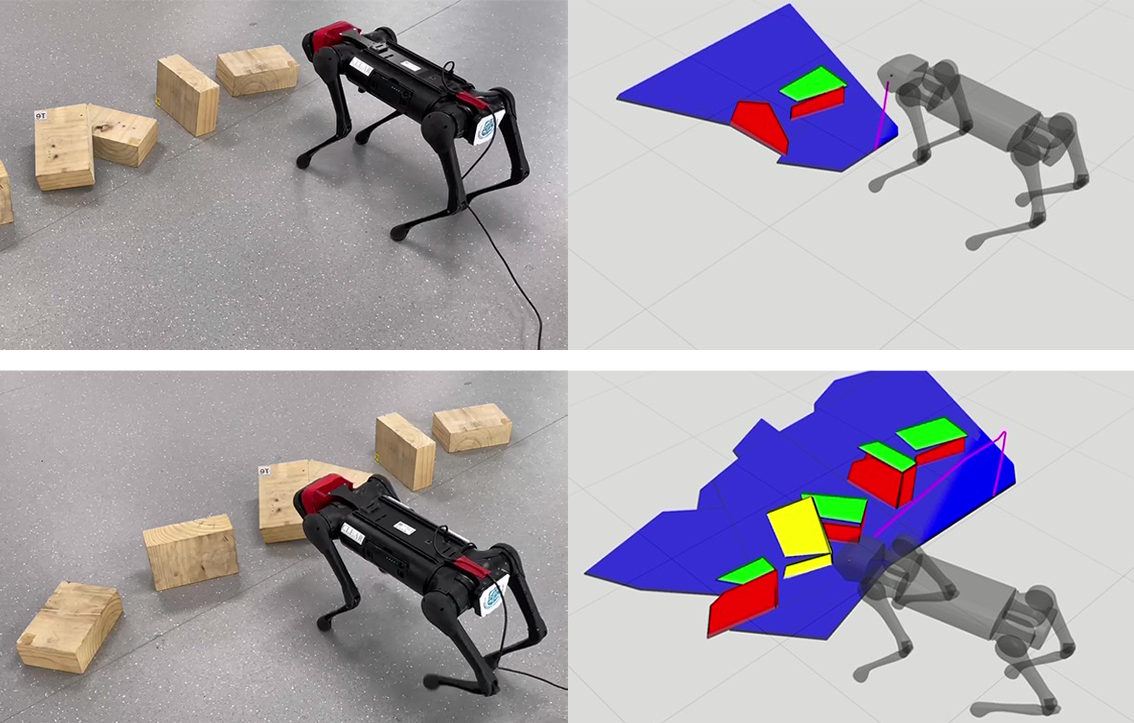
This paper studies the problem of constructing polytopic representations of planar regions from depth camera readings. This problem is of great importance for terrain mapping in complicated environment and has great potentials in legged locomotion applications. To address the polytopic planar region characterization problem, we propose a two-stage solution scheme. At the first stage, the planar regions embedded within a sequence of depth images are extracted individually first and then merged to establish a terrain map containing only planar regions in a selected frame. To simplify the representations of the planar regions that are applicable to foothold planning for legged robots, we further approximate the extracted planar regions via low-dimensional polytopes at the second stage. With the polytopic representation, the proposed approach achieves a great balance between accuracy and simplicity. Experimental validations with RGB-D cameras are conducted to demonstrate the performance of the proposed scheme. The proposed scheme successfully characterizes the planar regions via polytopes with acceptable accuracy. More importantly, the run time of the overall perception scheme is less than 10ms (i.e., > 100Hz) throughout the tests, which strongly illustrates the advantages of our approach developed in this paper.
翻译:本文研究从深层照相机读数中构造平板区域多立体图的问题。这个问题对于在复杂环境中绘制地形图十分重要,而且具有巨大的腿动应用潜力。为了解决多立体平板区域特征鉴定问题,我们提出一个两阶段的解决办法。在第一阶段,在深度图像序列中嵌入的平板区域先单独提取,然后合并,以在选定的框架内建立一个只包含平板区域的地形图。为了简化适用于脚踏式机器人脚底规划的平板区域的分布图,我们在第二阶段通过低维多端多面图进一步接近提取的平板区域。在多位图示中,拟议的方法在精确性和简单性之间取得了很大的平衡。用RGB-D摄像机进行实验性鉴定,以展示拟议办法的性能。拟议的办法成功地通过多层图层区域以可接受的准确性标出。更重要的是,整个测测图的运行时间不到10米(即 > 100赫兹),这有力地说明了我们在本文中制定的方法的优点。