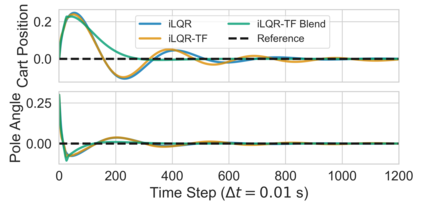
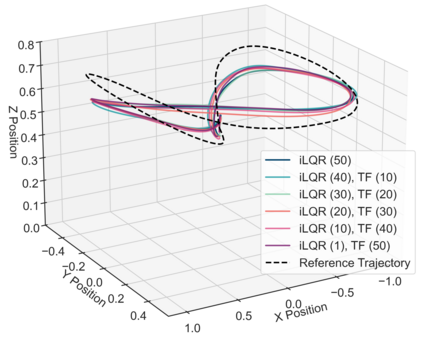
Real-time optimal control remains a fundamental challenge in robotics, especially for nonlinear systems with stringent performance requirements. As one of the representative trajectory optimization algorithms, the iterative Linear Quadratic Regulator (iLQR) faces limitations due to their inherently sequential computational nature, which restricts the efficiency and applicability of real-time control for robotic systems. While existing parallel implementations aim to overcome the above limitations, they typically demand additional computational iterations and high-performance hardware, leading to only modest practical improvements. In this paper, we introduce Quattro, a transformer-accelerated iLQR framework employing an algorithm-hardware co-design strategy to predict intermediate feedback and feedforward matrices. It facilitates effective parallel computations on resource-constrained devices without sacrificing accuracy. Experiments on cart-pole and quadrotor systems show an algorithm-level acceleration of up to 5.3$\times$ and 27$\times$ per iteration, respectively. When integrated into a Model Predictive Control (MPC) framework, Quattro achieves overall speedups of 2.8$\times$ for the cart-pole and 17.8$\times$ for the quadrotor compared to the one that applies traditional iLQR. Transformer inference is deployed on FPGA to maximize performance, achieving up to 27.3$\times$ speedup over commonly used computing devices, with around 2 to 4$\times$ power reduction and acceptable hardware overhead.
翻译:暂无翻译