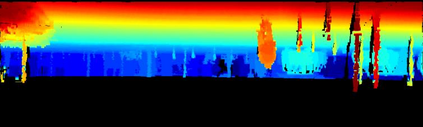
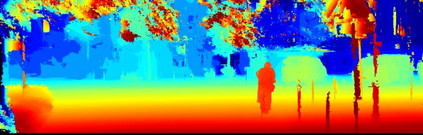
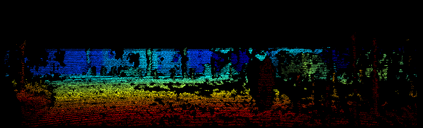
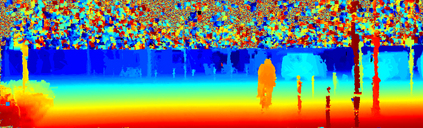
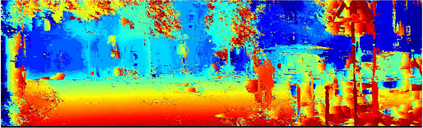
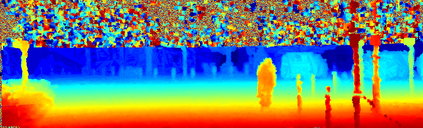
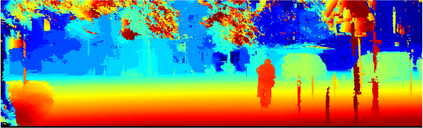
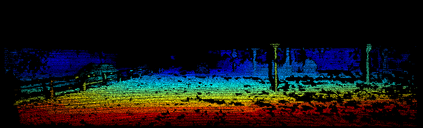
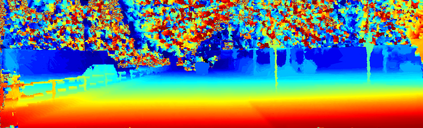
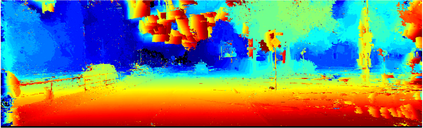
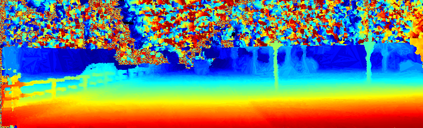
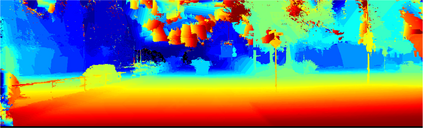
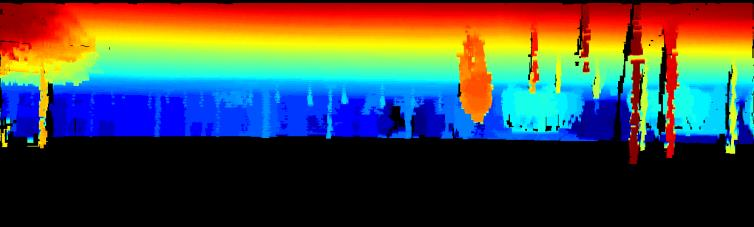
Depth estimation is one of the key technologies in some fields such as autonomous driving and robot navigation. However, the traditional method of using a single sensor is inevitably limited by the performance of the sensor. Therefore, a precision and robust method for fusing the LiDAR and stereo cameras is proposed. This method fully combines the advantages of the LiDAR and stereo camera, which can retain the advantages of the high precision of the LiDAR and the high resolution of images respectively. Compared with the traditional stereo matching method, the texture of the object and lighting conditions have less influence on the algorithm. Firstly, the depth of the LiDAR data is converted to the disparity of the stereo camera. Because the density of the LiDAR data is relatively sparse on the y-axis, the converted disparity map is up-sampled using the interpolation method. Secondly, in order to make full use of the precise disparity map, the disparity map and stereo matching are fused to propagate the accurate disparity. Finally, the disparity map is converted to the depth map. Moreover, the converted disparity map can also increase the speed of the algorithm. We evaluate the proposed pipeline on the KITTI benchmark. The experiment demonstrates that our algorithm has higher accuracy than several classic methods.
翻译:深度估算是自动驾驶和机器人导航等某些领域的关键技术之一。 但是,使用单一传感器的传统方法不可避免地受到传感器性能的限制。 因此, 提出了一种精确和稳健的防爆激光雷达和立体摄像机的方法。 这种方法完全结合了立体雷达和立体照相机的优点, 它可以保留立体雷达高精度和图像高分辨率的优点。 与传统的立体匹配方法相比, 对象的纹理和照明条件对算法的影响较小。 首先, 将立体雷达数据的深度转换为立体照相机的偏差。 由于立体雷达数据的密度在 y- 轴上相对稀少, 转换的偏差图是使用内推法加印的。 其次, 为了充分利用精确差异图和图像高分辨率的优点, 差异图和立体比对立体的精度混在一起, 以传播准确的差。 最后, 差异图被转换为深度图。 此外, 转换的悬殊地图也可以提高立体摄影的速度。 我们评估了在 KITTI 基准上的拟议管道的精确度。