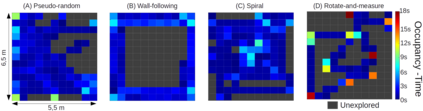
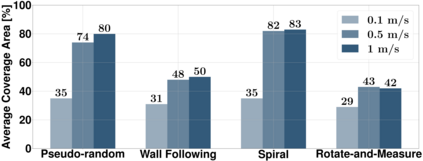
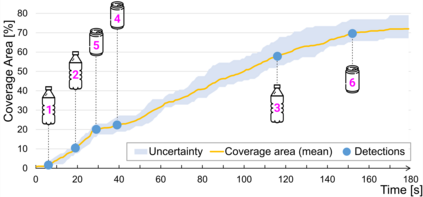
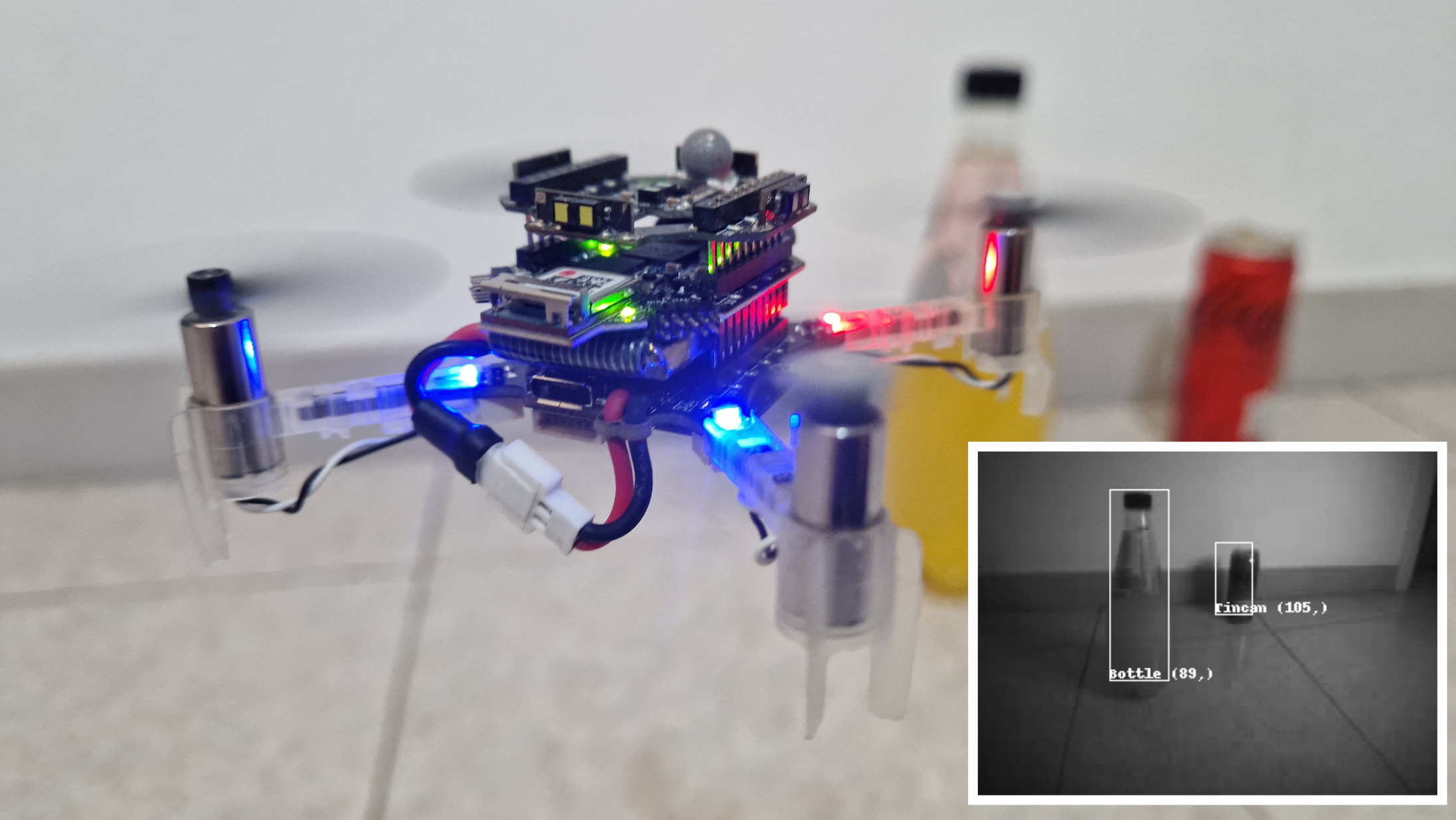
Nano-sized drones, with palm-sized form factor, are gaining relevance in the Internet-of-Things ecosystem. Achieving a high degree of autonomy for complex multi-objective missions (e.g., safe flight, exploration, object detection) is extremely challenging for the onboard chip-set due to tight size, payload (<10g), and power envelope constraints, which strictly limit both memory and computation. Our work addresses this complex problem by combining bio-inspired navigation policies, which rely on time-of-flight distance sensor data, with a vision-based convolutional neural network (CNN) for object detection. Our field-proven nano-drone is equipped with two microcontroller units (MCUs), a single-core ARM Cortex-M4 (STM32) for safe navigation and exploration policies, and a parallel ultra-low power octa-core RISC-V (GAP8) for onboard CNN inference, with a power envelope of just 134mW, including image sensors and external memories. The object detection task achieves a mean average precision of 50% (at 1.6 frame/s) on an in-field collected dataset. We compare four bio-inspired exploration policies and identify a pseudo-random policy to achieve the highest coverage area of 83% in a ~36m^2 unknown room in a 3 minutes flight. By combining the detection CNN and the exploration policy, we show an average detection rate of 90% on six target objects in a never-seen-before environment.
翻译:纳米尺寸的无人驾驶飞机,以棕榈尺寸成型,在互联网生态系统中越来越具有相关性。实现复杂的多目标飞行任务(如安全飞行、勘探、物体探测)高度自主性,对于机上芯片组来说,由于紧凑的尺寸、有效载荷( <10g)和电源封套限制,严格限制记忆和计算,对机上芯片组构成了极具挑战性的挑战。我们的工作解决了这一复杂问题,将生物启发性的导航政策(依靠飞行时间远程传感器数据)与基于视觉的神经神经神经网络(CNN)相结合,以探测物体。我们实地验证的纳米探矿系统有两个微控制器(MCUs)、一个用于安全导航和勘探政策的单一核心Cortex-M4(STM32)和一个平行的超低能量(IRSC-V)(GAP8),在CNN的推断中,其能量封套布只有134米W,包括图像传感器和外部记忆。目标探测任务实现了平均50%的精确度(在1.6框架/Mirmreal 目标中),在生物探测政策中,我们收集了一条未知区域中显示一个比例为83的50%的图像探测政策。我们收集了一条不为80。我们收集了一条地图,并在一个未知域域中,我们所收集了一条地图上的一个数据。