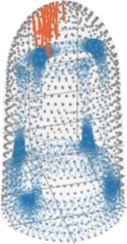
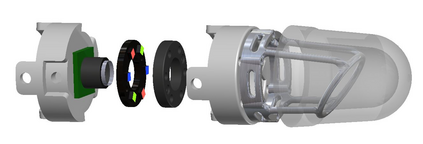
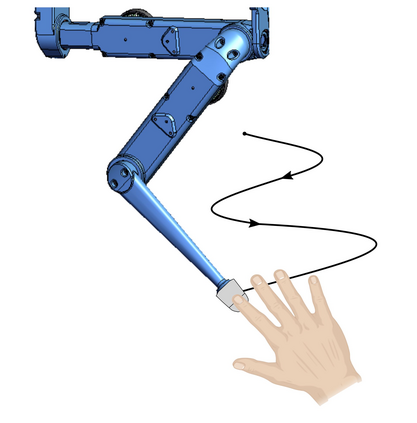
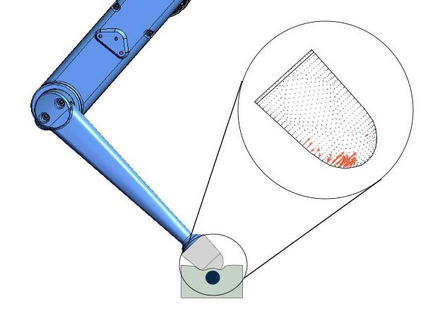
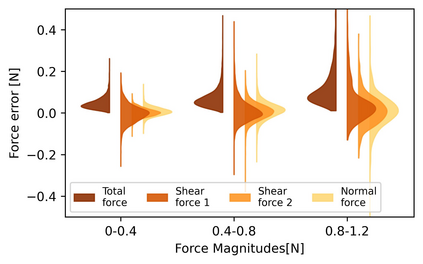
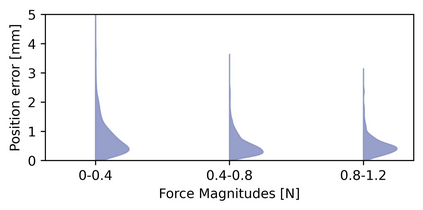
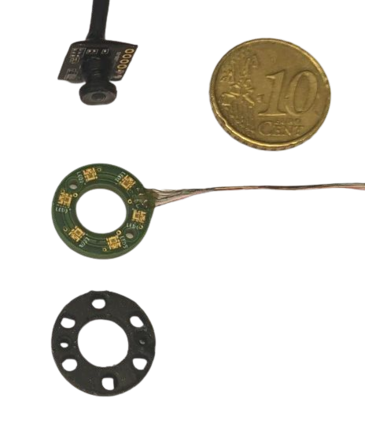
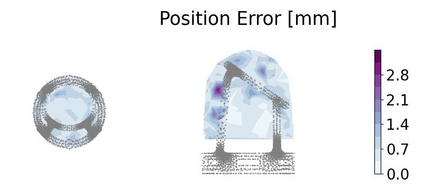
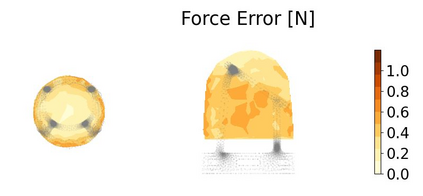
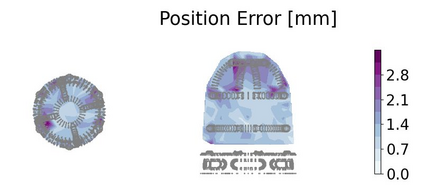
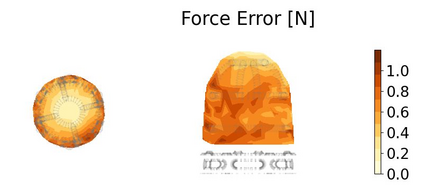
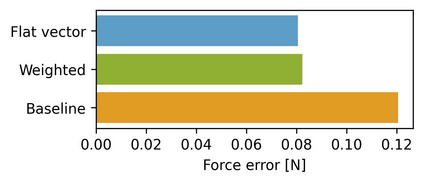
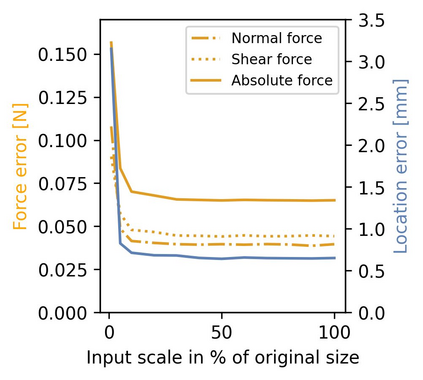
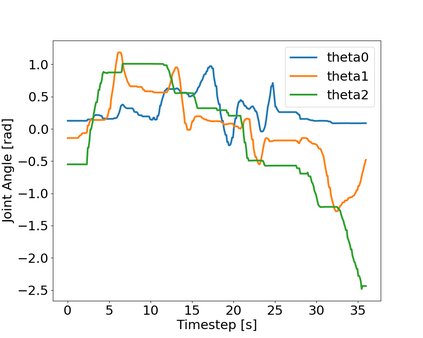
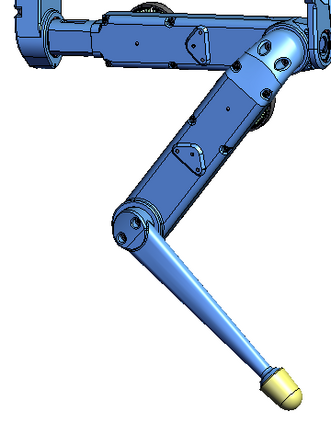
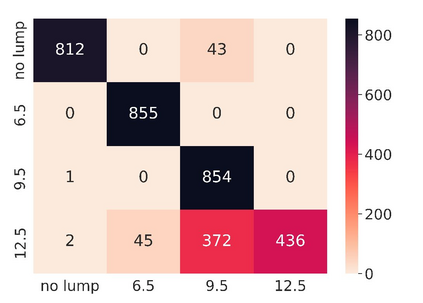
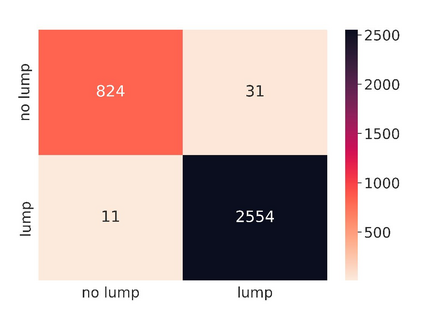
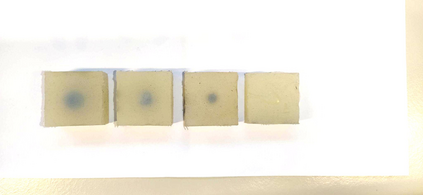
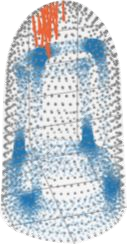
Intelligent interaction with the physical world requires perceptual abilities beyond vision and hearing; vibrant tactile sensing is essential for autonomous robots to dexterously manipulate unfamiliar objects or safely contact humans. Therefore, robotic manipulators need high-resolution touch sensors that are compact, robust, inexpensive, and efficient. The soft vision-based haptic sensor presented herein is a miniaturized and optimized version of the previously published sensor Insight. Minsight has the size and shape of a human fingertip and uses machine learning methods to output high-resolution maps of 3D contact force vectors at 60 Hz. Experiments confirm its excellent sensing performance, with a mean absolute force error of 0.07 N and contact location error of 0.6 mm across its surface area. Minsight's utility is shown in two robotic tasks on a 3-DoF manipulator. First, closed-loop force control enables the robot to track the movements of a human finger based only on tactile data. Second, the informative value of the sensor output is shown by detecting whether a hard lump is embedded within a soft elastomer with an accuracy of 98%. These findings indicate that Minsight can give robots the detailed fingertip touch sensing needed for dexterous manipulation and physical human-robot interaction.
翻译:智能与物理世界的交互需要超越视听的知觉能力;充满活力的触觉感应对于自主机器人巧妙地操纵陌生对象或安全地接触人类至关重要。因此,机器人操纵装置需要高分辨率的接触传感器,而这些传感器要求体积小,坚固,价格便宜,且具有高效性。本文介绍的软视觉型触觉传感器是先前发表的 Insight 传感器的迷你版和优化版。Minsight 的尺寸和形状与人类指尖相同,使用机器学习方法,以 60 Hz 的频率输出高分辨率的 3D 接触力向量图。实验证实了它的出色感知性能,在其表面积上具有 0.07 N 的平均绝对力误差和 0.6 mm 的接触位置误差。Minsight 的实用性在一个 3-DoF 机械臂上的两个机器人任务中得到展示。首先,闭环力控制使机器人能够仅基于触觉数据跟踪人类的手指运动。其次,通过检测软弹性体内的硬隆起粒子在具有 98% 的准确性的情况下证明了传感器输出的信息价值。这些研究结果表明 Minsight 可以让机器人具有巧妙操纵和物理人机交互所需的详细指尖触觉感知能力。