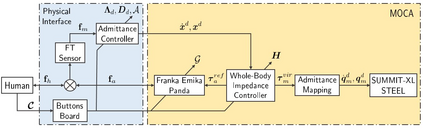
This paper presents a physical interface for collaborative mobile manipulators in industrial manufacturing and logistics applications. The proposed work builds on our earlier MOCA-MAN interface, through which an operator could be physically coupled to a mobile manipulator to be assisted in performing daily activities. The previous interface was based on a magnetic clamp attached to one arm of the user for the coupling stage, and a bracelet based on EMG sensors on the other arm for human-robot communication via gestures. The new interface instead presents the following additions: i) An industrial-like design that allows the worker to couple/decouple easily and to operate mobile manipulators locally; ii) A simplistic communication channel via a simple buttons board that allows controlling the robot with one hand only; iii) The interface offers enhanced loco-manipulation capabilities that do not compromise the worker mobility. Besides, an experimental evaluation with six human subjects is carried out to analyze the enhanced locomotion and flexibility of the proposed interface in terms of mobility constraint, usability, and physical load reduction.
翻译:本文介绍了工业制造和后勤应用中协作移动操纵器的物理界面。拟议工作以我们早先的MOCA-MAN界面为基础,通过该界面,操作者可以身体上与移动操纵器连接,协助其开展日常活动。上一个界面基于连接阶段用户一个臂上的磁夹,另一臂上基于环境管理小组传感器的手镯,通过手势进行人体-机器人交流。新的界面提供了以下补充内容:一)一种工业式设计,使工人能够方便地对接/对接并在当地操作移动操纵器;二)通过一个简单的按钮板进行简单化的通信通道,仅允许用一只手控制机器人;三)该界面提供了增强的遥控控制能力,不会损害工人的流动性。此外,还进行了一项涉及6个人类主体的实验性评估,以分析拟议界面在流动性限制、可用性和实际负荷减少方面增强的移动和灵活性。