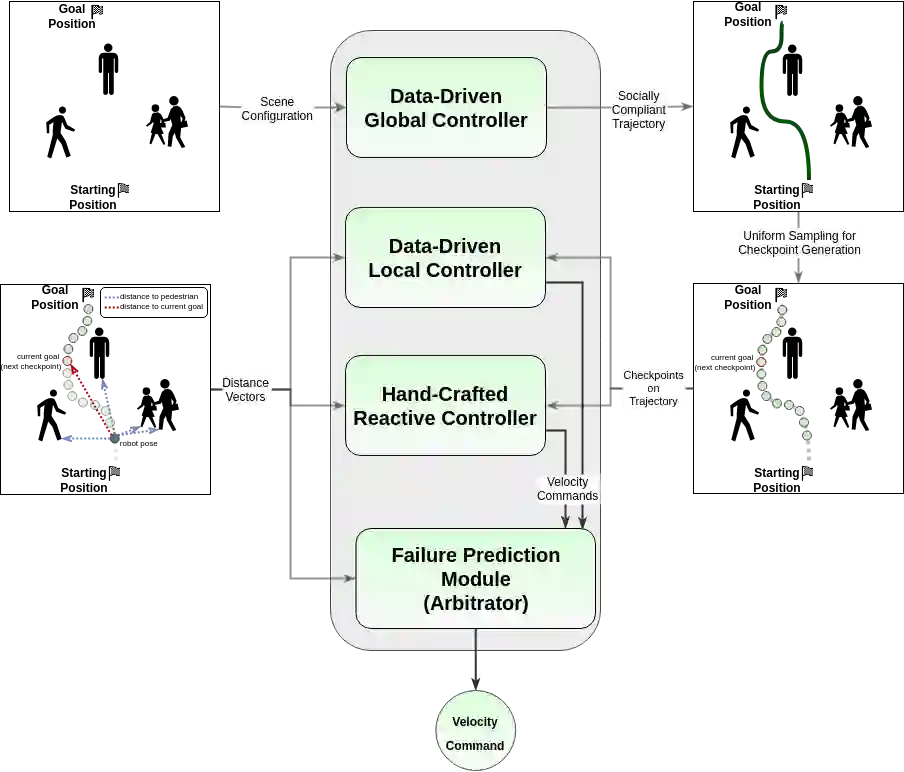
Sociability is essential for modern robots to increase their acceptability in human environments. Traditional techniques use manually engineered utility functions inspired by observing pedestrian behaviors to achieve social navigation. However, social aspects of navigation are diverse, changing across different types of environments, societies, and population densities, making it unrealistic to use hand-crafted techniques in each domain. This paper presents a data-driven navigation architecture that uses state-of-the-art neural architectures, namely Conditional Neural Processes, to learn global and local controllers of the mobile robot from observations. Additionally, we leverage a state-of-the-art, deep prediction mechanism to detect situations not similar to the trained ones, where reactive controllers step in to ensure safe navigation. Our results demonstrate that the proposed framework can successfully carry out navigation tasks regarding social norms in the data. Further, we showed that our system produces fewer personal-zone violations, causing less discomfort.
翻译:现代机器人在人类环境中的可接受性至关重要。传统技术利用由观察行人行为而激发的人工工程实用功能来实现社会导航。然而,航行的社会方面是多种多样的,在不同类型的环境、社会和人口密度方面变化不一,使得在每个领域使用手工艺技术是不现实的。本文展示了一种数据驱动的导航结构,它使用最先进的神经神经结构,即有条件神经过程,从观测中学习移动机器人的全球和地方控制器。此外,我们利用一个最先进的、深入的预测机制来探测与受过训练的不相类似的情况,反应控制器站在那里站出来确保安全导航。我们的结果表明,拟议的框架能够成功地执行关于数据中社会规范的导航任务。此外,我们显示,我们的系统减少了个人和当地对空间的破坏,造成较少的不便。