【泡泡点云时空】三维点云配准中多视角图像描述子的检测与匹配(ECCV2018-11)
泡泡点云时空,带你精读点云领域顶级会议文章
标题:Learning and Matching Multi-View Descriptors for Registration of Point Clouds
作者:Lei Zhou, Siyu Zhu, Zixin Luo, Tianwei Shen, Runze Zhang, Mingmin Zhen, Tian Fang, Long Quan(Hong Kong University of Science and Technology)
来源:ECCV 2018(European Conference on Computer Vision)
播音员:程枭
编译:徐二帅
审核:吕佳俊、郑森华
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

点云配准的关键是在3D空间点之间建立准确的对应关系。解决方法有很多种,如设计有辨别力的3D局部描述子、鲁棒的匹配策略等。本文提出了一个基于多视角图像的局部描述子,它从多视图像中习得,用于描述3D特征点。此外,我们设计了一种鲁棒的匹配方法,希望在所定义的图模型进行置信传播以有效的剔除异常匹配。我们在公开的激光数据集上和多视立体数据集上测试本文算法,并与各种描述子、匹配方法进行比较,验证了本文提出的算法具有卓越性能。
思路
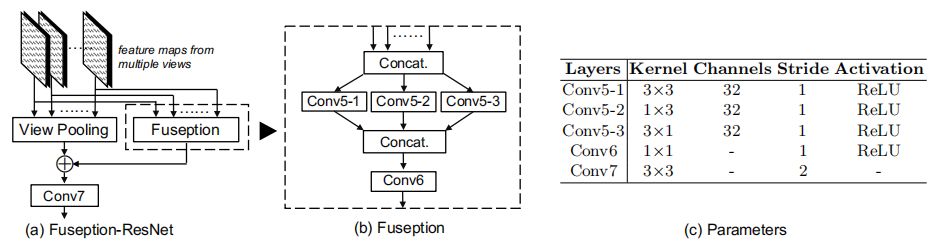
如上图所示,受ResNet启发,我们提出Fuseption-ResNet架构,其中视图池化作为短路连接,并加上Fuseption分支负责学习残差映射。两个分支在精度和收敛率方面互相加强。采用3×3、1×3和3×1三种不同尺寸的的轻量级空间滤波器提取不同类型的特征。随后,采用上述级联特征映射的1×1卷积负责跨通道的统计量的合并以及降维。最后利用置信传播来进行匹配
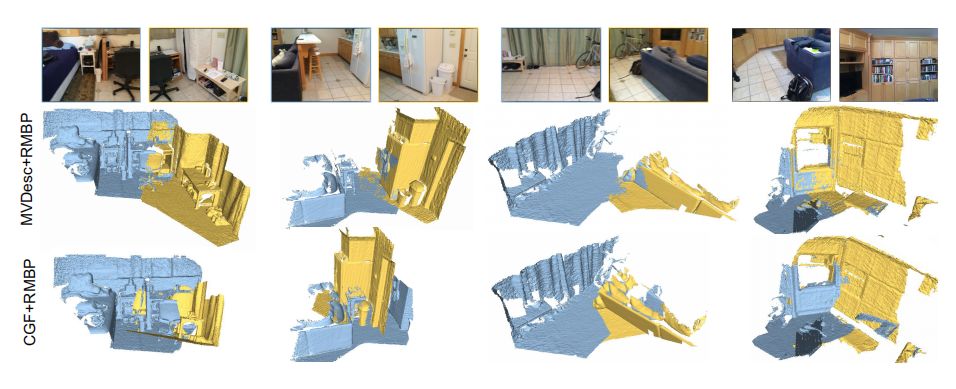
上图展示了在只有一小部分重叠的情况下,本文提出的算法依然有很好的匹配效果。

Abstract
Critical to the registration of point clouds is the establishment of a set of accurate correspondences between points in 3D space. The correspondence problem is generally addressed by the design of discriminative 3D local descriptors on the one hand, and the development of robust matching strategies on the other hand. In this work, we first propose a multi-view local descriptor, which is learned from the images of multiple views, for the description of 3D keypoints. Then, we develop a robust matching approach, aiming at rejecting outlier matches based on the efficient inference via belief propagation on the defined graphical model. We have demonstrated the boost of our approaches to registration on the public scanning and multi-view stereo datasets. The superior performance has been verified by the intensive comparisons against a variety of descriptors and matching methods
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com


