
优秀领导者必为卓越管理者,然卓越管理者未必是优秀领导者。二者核心差异在于关键决策能力。当今决策环境呈现"动荡性、不确定性、复杂性、模糊性"(VUCA)特征。随着系统技术能力呈指数级增长,人类已成为运用此类系统的最薄弱环节。为保持决策效能,优秀领导者必须持续适应技术与流程革新。本研究贡献在于提供多项创新解决方案,助力领导者运用人工智能工具优化不确定性环境下的决策机制。首要突破在于开发新型项目管理方法——融合人工智能遗传算法原理与传统采办模式精髓,以应对双重挑战:量化技术随创新速度迭代更新,用户质性需求同步演变,导致解决方案部署频频超时超支。研究进一步验证神经模糊系统等人工智能工具的实用性:通过注入不确定性要素与深度迁移学习技术,提升军事目标识别决策评估效能。本论文成果具有广泛适用性,可供项目经理、工程实践者及各级领导者运用人工智能工具优化决策流程。
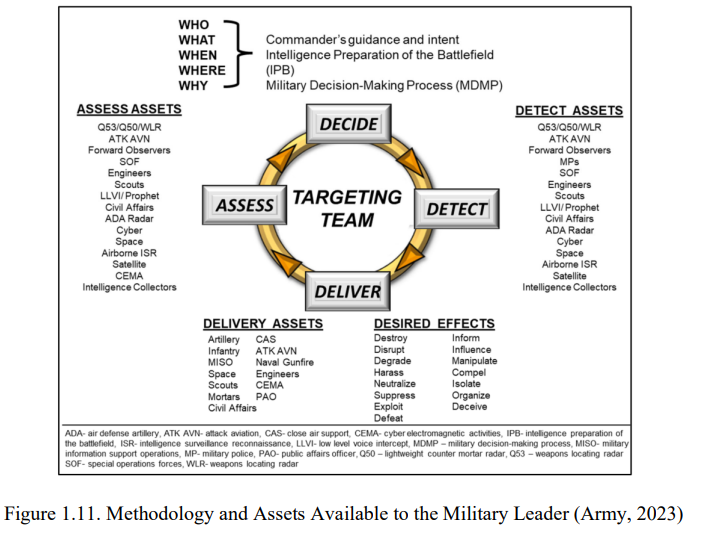
军事领导力培养通过持续训练强化军官决策技能,尤其注重提升自然决策法(NDM)能力。然而传统训练(如军事任务规划)多属静态桌面推演:制定行动方案(COA)并与采用可预测战术的"红方"进行对抗模拟(即推演结果不包含不确定性)。此类红方通常由接受过传统对抗战术训练的军官、水兵及文职人员组成,在特定任务场景中扮演假想敌(OPFOR)。计算机模拟中,红方行动方案皆属预设程序,既未融入实时真实世界数据,其对抗行为亦无随机性。这种确定性场景导致受训军官逐渐掌握系统规律并"破解"推演,最终削弱训练实效。该缺陷凸显引入专家系统与计算智能技术、为场景注入动态变量不确定性的必要性。任务执行时始终存在两大不确定变量:传感器系统可用性与实际环境条件(此处特指气象因素)。
自1980年代起,美国陆军与海军已围绕自然决策法完成大量研究(Li等,2020;Perrin等,2001)。当军方认可领导者自然决策能力时,风险分析与防控便成为每项军事行动预案的核心构成。多项定性与定量研究开发的风险弹性评估模型已被纳入任务规划体系(Curt与Tacnet,2018;Fisher与Norman,2010;Jabbour与Muccio,2011;Rehak等,2019;Richards等,2020)。但所有评估模型结果均依赖专家主观输入,可能引发模型结果波动——此乃本研究着力突破的已知缺陷。尽管既往研究已将人工智能方法应用于风险评估与自然决策(Ibanez与McCalley,2011;Lam与Tai,2018;Muller,2012),现有文献在评估专家输入、以及运用AI应对输入所致显著变异性方面存在明显不足。军事领域尤甚:高层领导坦承当前数据分析流程严重滞后于技术发展,本研究旨在此领域弥合差距。
航空与军事界已就模糊模型风险评估展开深入研究。模糊风险矩阵被用于评估航空事故概率与严重程度,多项模糊推理系统通过处理风险评估中的不确定性,输出比传统专家判断更精准可靠的结果(Markowski & Mannan,2008;Skorupski,2016;Kuklev等,2018)。但这些研究的输入变量多关注外部因素与装备特性(飞机、机场等),对决策者背景仅作简略讨论。本研究将通过聚焦个体(非装备)输入改善此缺陷。自1980年代以来,美军持续推进自然决策法研究项目,但人工智能应用仍停留于"未来研究方向"层面(Li等,2020),其提升规范性任务规划训练以优化自然决策的潜力几无探讨。与多数军事工具类似,使用者仍需依赖人工专家输入获取结果。例如陆军航空兵每次任务前必须完成风险评估工具,凭借个人专业判断能否安全执行计划任务。
研究目标与贡献
本研究旨在应用人工智能工具、技术与模型提升不确定性环境下的决策效能。三项核心贡献如下:
成果一:首篇论文着力解决军事规划中真实场景模拟难题,通过向模型注入随机性(随机不确定性)实现。研究目标在于验证神经模糊系统能否成为军事训练模型中模拟"战争迷雾"不确定性的有效工具。该研究通过降级传感器系统性能、采用浅层神经网络分类环境危害输出以调整电磁频谱可见度,并运用模糊推理系统评估气象环境状态严重程度。神经模糊算法证明:不同严重等级的环境危害可有效模拟特定光电武器系统可用性下降,并降低规划者/决策者在场景推演中的可视能力。神经模糊系统的应用验证了专家系统提升受训军官决策能力的价值。
成果二:第二篇论文聚焦新型采办方法以降低复杂项目全生命周期管理的不确定性。研究开发创新采办路径,实时优化项目成功核心指标(成本、进度、性能与风险),确保技术解决方案在项目周期内保持前沿性与"业界最优"。该方法通过遗传算法人工智能技术构建"遗传采办流程"。
遗传采办法运用人工智能遗传算法原理,建立兼顾定量技术部署与定性用户接纳的方法论以应对不确定性,从而降低复杂项目成本、进度与性能目标风险。该创新方法本身具有遗传特性:持续融合敏捷采办、模块化采办及渐进式采办等传统策略精髓,通过技术永续更新机制,同时强调运用人本设计确保系统用户适配性。
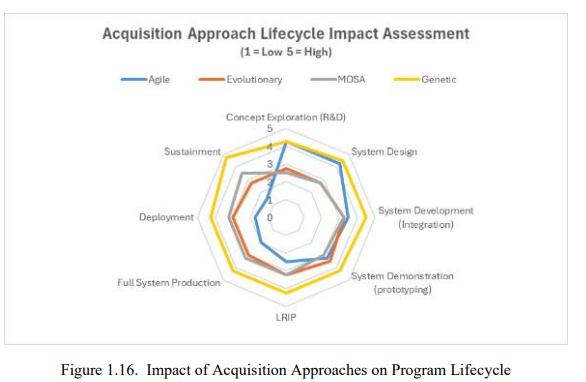
采用目标导向(非需求导向)方法可降低法规变更与技术过时的不确定性——目标长期固定能减少(非消除)性能范围蔓延。技术永续更新概念进一步弱化技术过时风险:其核心在于系统集成子组件采用模块化设计,技术淘汰时可便捷实施"即插即用"式替换更新。技术即服务(TaaS)模式确保预算通过固定价格合同锁定,规避未预见且未约定的工时物料变动成本。项目管理者(决策者)需运用所有现行项目管理技术管理不确定性:如PERT图(提供项目进度及任务级成本/进度乐观悲观值)、阶段评审决策机制(结合独立验证确认与作战试验评估等独立监督手段)确认成本进度性能指标,在降低不确定性同时防控项目风险。如图1.16所示,经四位国家级项目管理专家采用修正德尔菲法进行定性验证,新型遗传采办法显著优于传统采办模式。
成果三:本研究目标在于探究深度迁移学习模型能否提升装甲车辆敌我识别分类精度。通过比较研究评估多种预训练深度学习模型对敌目标识别与交战的适用性。研究选取主流图像分类模型进行对比,聚焦各模型将车辆图像正确分类为"友方坦克"或"敌方坦克"的验证精度,最终开发集成模型并与单体模型结果比对。论文同时探讨"人在回路"概念及人工智能敌我识别(IFF)的伦理考量。
研究证实预训练模型具备区分敌我坦克的潜力,但其精度尚不足以满足多数实战场景。美军交战规则要求军事领导者明确武器控制状态:
• "武器限制":仅在被攻击或受命时交战
• "谨慎使用":仅攻击明确识别的敌方目标
• "自由开火":攻击所有未明确识别为友方的目标(陆军卓越机动中心,2024)
战场多数情况下需明确识别敌方目标,故低于95%的识别精度均不足用;特定场景(如城区环境)甚至要求100%精度。但在"自由开火"场景中(作战人员预设所有遭遇车辆为敌),敌我分类需求不复存在。本研究成果具有广泛适用性,可供项目经理、工程实践者及各级领导者运用人工智能工具优化决策流程。

