【泡泡一分钟】基于法向量的三维表面细节增强(ICCV2017-244)
每天一分钟,带你读遍机器人顶级会议文章
标题:3D Surface Detail Enhancement from A Single Normal Map
作者:Wuyuan Xie,Miaohui Wang,Xianbiao Qi,Lei Zhang
来源:International Conference on Computer Vision (ICCV 2017)
编译:倪志鹏
审核:颜青松 陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

在三维重建中,视觉传感器的采样和量化过程限制了三维表面细节表现程度。如何以低成本获得细粒度的3D表面,仍旧是对经验、设备和易于获取方面的巨大考验。
本文提出一个新的框架,使用法向量增强三维重建结果,而不是单纯依赖硬件和反射模型。本文提出了新的增强依据,即角度轮廓,来描述三维表面中隐藏的细节。本文还进一步使用了离散几何处理(DGP)来进一步获取更加稳定的增强结果。
大量仿真结果表明,该方法在主观视觉评估和客观质量度量方面均优于均匀锐化方法。

图1 增强的3D表面结果:左边是来自哈佛数据集的法线贴图的3D表面; 右边是我们输入相同分辨率的直接增强结果。
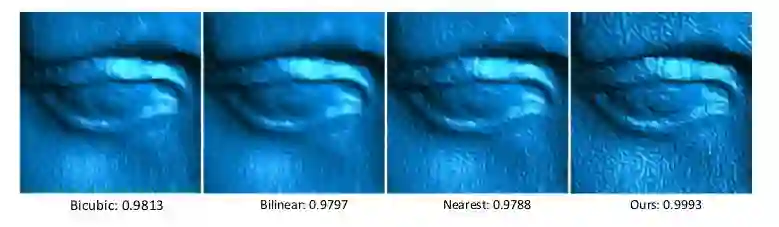
图2 在法线贴图上应用图像不同锐化方法的比较。 将法线贴图作为图像并应用三个上采样(3×3)方法双三次,双线性,最近邻,然后进行图像锐化。

Abstract
In 3D reconstruction, the obtained surface details are mainly limited to the visual sensor due to sampling and quantization in the digitalization process. How to get a fine-grained 3D surface with low-cost is still a challenging obstacle in terms of experience, equipment and easy-to-obtain.
This work introduces a novel framework for enhancing surfaces reconstructed from normal map, where the assumptions on hardware (e.g., photometric stereo setup) and reflection model (e.g., Lambertion reflection) are not necessarily needed.We propose to use a new measure, angle profile, to infer the hidden micro-structure from existing surfaces.In addition, the inferred results are further improved in the domain of discrete geometry processing(DGP) which is able to achieve a stable surface structure under a selectable enhancement setting.
Extensive simulation results show that the proposed method obtains significantly improvements over uniform sharpening method in terms of both subjective visual assessment and objective quality metric.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





