【泡泡图灵智库】NID-SLAM:使用归一化信息距离的鲁棒单目SLAM
泡泡图灵智库,带你精读机器人顶级会议文章
标题:NID-SLAM: Robust Monocular SLAM using Normalised Information Distance
作者:Geoffrey Pascoe, Will Maddern, Michael Tanner, Pedro Pinie ́s and Paul Newman
来源:CVPR2017
编译:刘小亮
审核:蔡纪源
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——NID-SLAM:使用归一化信息距离的鲁棒单目SLAM,该文章发表于CVPR2018。
本文提出了一种基于归一化信息距离(NID)度量的直接单目SLAM算法。相比于当前现有的基于光度误差最小化的直接法,在与场景呈现出变化的光照、天气和结构下,本文基于信息论NID度量法显的更加鲁棒。本文实验展示了在人造室内照明变化的场景下和通过使用车载摄像头采集的天气变化(晴天,雨天,雪天)真实场景下,成功进行定位和建图。本文的方法使用OpenGL且能在消费级GPU上实时运行,实验表现出与现有的光度测量方法相当的定位精度,但在表观变化的情况下鲁棒性要明显优于现有的直接法和基于特征的方法。
介绍
本文主要贡献有以下三方面:
(1)一种基于NID的跟踪方法,将深度不确定性明确纳入估计姿态解;
(2)一种用于基于NID的跟踪的多分辨率直方图表示,其增强姿态估计算法的收敛能力并减少计算时耗;
(3)一种基于NID的深度图更新方法,即使出现表观变化,也可以进行长期地图更新和维护。
算法流程
下图为本文方法的整体算法流程
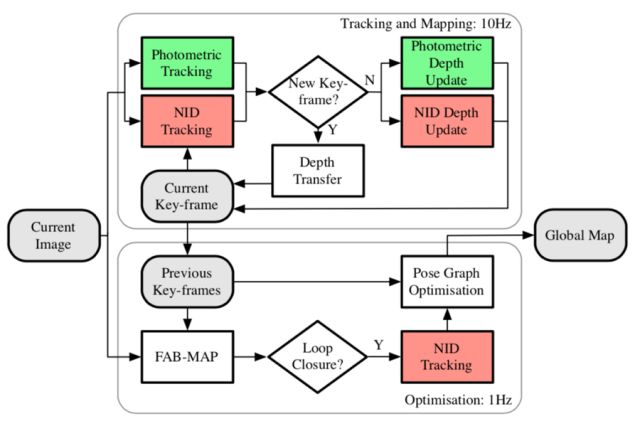
图1 NID-SLAM流程图。关键的组成部分是光度跟踪与建图(绿色),以及鲁棒的NID方法(红色)。回环检测使用FAB-MAP检测,而鲁棒的NID跟踪方法用于生成约束来构建一致的全局地图。本文方法的跟踪与建图使用OpenGL在GPU下能以10Hz速度运行,同时回环检测和优化在CPU下能以1Hz的速度并行运行。
主要结果
(1)本文实验使用两个数据集:一个是New Tsukuba室内数据集 ,一个是Oxford RobotCar 室外数据集。如下图示例。本文总共进行了16组室内实验和36组室外实验,每组实验都包含两种不同条件下的两个连续的观测数据,算法的目标是在利用第一个连续数据建立的SLAM地图的基础上尽可能成功的对第二个连续数据进行定位和追踪。为了评估追踪的性能,本文在第一个连续观测数据和第二个连续观测数据上对首个关键帧进行了手动选取,这样就能排除回环检测对追踪性能的干扰。性能评估主要是比较相对第一组观测数据的关键帧,第二组观测数据的成功追踪的百分比。

图2 室内New Tsukuba数据和室外Oxford RobotCar数据集示例图:(a)顺时针分别是室内办公室在日光,荧光灯,手电筒和灯泡照明的情况。(b)顺时针分别是城市环境在晴朗,阴天,黄昏,夜间,雪和雨的情况。对于单目SLAM这些数据集都具有很大的挑战。
(2)鲁棒的室内跟踪,NID-SLAM在几乎所有的数据中都表现出更可靠的追踪预测精度,仅有两次实验结果ORB-SLAM2得到了更高的成功率。
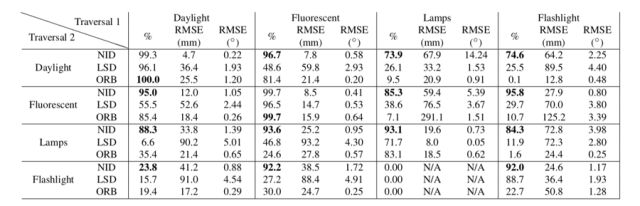
表1 在室内数据集New Tsukuba上的实验结果
(3)深度图更新。在Fluorescent和Lamp情况中,NID深度图更新相当成功,第二次遍历的深度误差减少了高达6%。
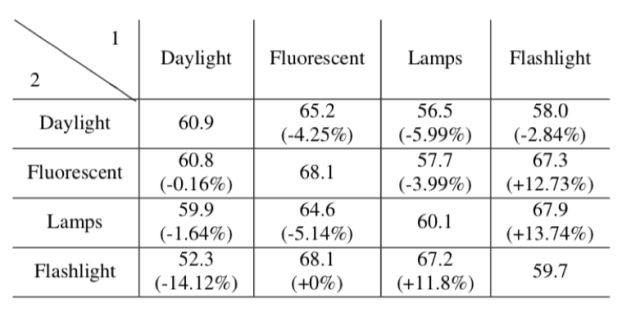
表2 New Tsukuba数据集上的深度图更新。所有测量值都是以毫米为单位的中值深度图误差; 括号中的百分比显示第二次遍历后的错误变化。
(4)鲁棒的室外跟踪,室外场景对算法的要求比室内场景更高。在前5种室外环境中,只有NID-SLAM在第一次观测中就成功生成了地图。

表3 在室外数据集Oxford RobotCar上的实验结果

Abstract
We propose a direct monocular SLAM algorithm based on the Normalised Information Distance (NID) metric. In contrast to current state-of-the-art direct methods based on photometric error minimisation, our information-theoretic NID metric provides robustness to appearance variation due to lighting, weather and structural changes in the scene. We demonstrate successful localisation and mapping across changes in lighting with a synthetic indoor scene, and across changes in weather (direct sun, rain, snow) using real-world data collected from a vehicle-mounted camera. Our approach runs in real-time on a consumer GPU using OpenGL, and provides comparable localisation accuracy to state-of-the-art photometric methods but significantly outperforms both direct and feature-based methods in robustness to appearance changes.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com


