【泡泡一分钟】协方差估计的深层推理:用于状态估计的学习高斯噪声模型
每天一分钟,带你读遍机器人顶级会议文章
标题:Deep Inference for Covariance Estimation: Learning Gaussian Noise Models for State Estimation
作者:Katherine Liu*, Kyel Ok*, William Vega-Brown, and Nicholas Roy
编译:章绩伟
审核:颜青松 陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文提出了一种新的测量值协方差估计方法,该方法将测量值的不确定程度建模为测量值本身的函数。预测传感器建模中的现有工作优于传统的固定模型,但需要传感器领域的知识,这严重影响模型的准确性和计算成本。在本研究中,我们提出了协方差估计值的深度推理方法(DICE),它利用深度神经网络来预测传感器测量值与原始传感器数据的协方差。我们展示了给定的原始传感器测量值和真实值的误差对,我们可以通过对模型预测性能的监督回归来了解测量模型的表现,从而消除了对手工编码特征和参数形式的需求。本文提出的算法可以适用于各种传感器,此外,本文展示了对模拟和实际数据的改进的协方差预测。
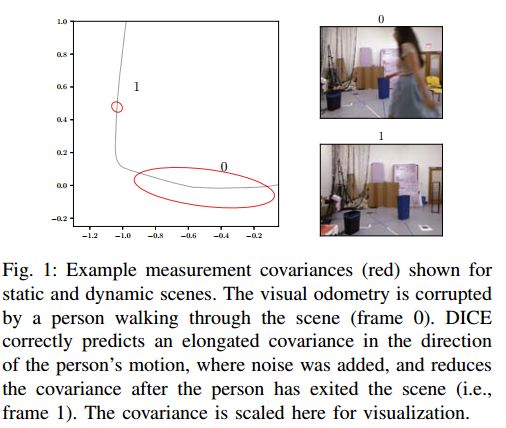
图1 表中展示了静态和动态场景的测量值协方差(红色)。视觉里程计被穿过场景的人(第0帧)破坏。DICE正确地预测了人的运动方向上的细长协方差,其中添加了噪声,并且在人离开场景(即,帧1)之后减小了协方差。协方差在此处进行缩放以用于可视化。
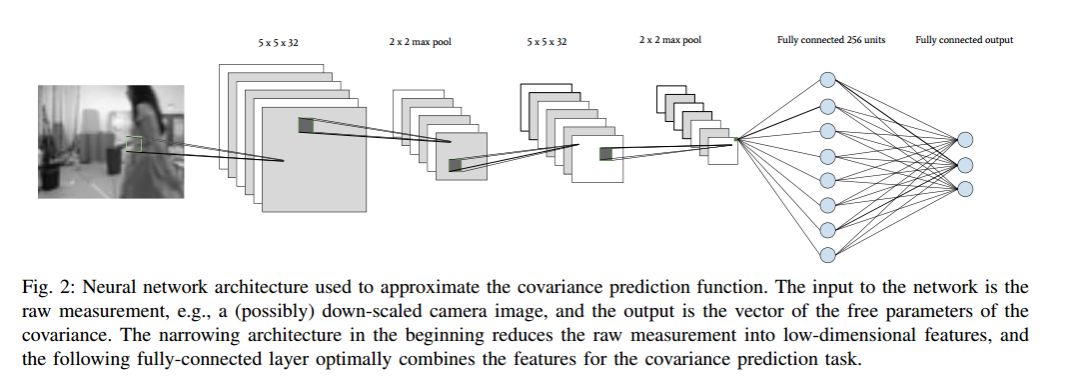
图2 用于近似协方差预测函数的神经网络架构。网络的输入是原始测量,例如,(可能)缩小的相机图像,并且输出是协方差的自由参数的矢量。开始时的缩小架构将原始测量减少为低维特征,并且随后的完全连接层最佳地组合了协方差预测任务的特征。
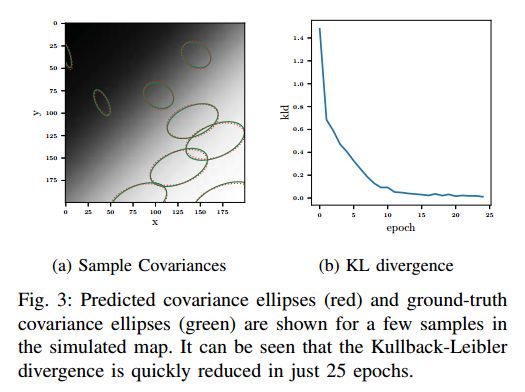
图3 对于模拟地图中的一些样本,示出了预测的协方差椭圆(红色)和真实值协方差椭圆(绿色)。可以看出,Kullback-Leibler分歧在短短25个时期内迅速降低
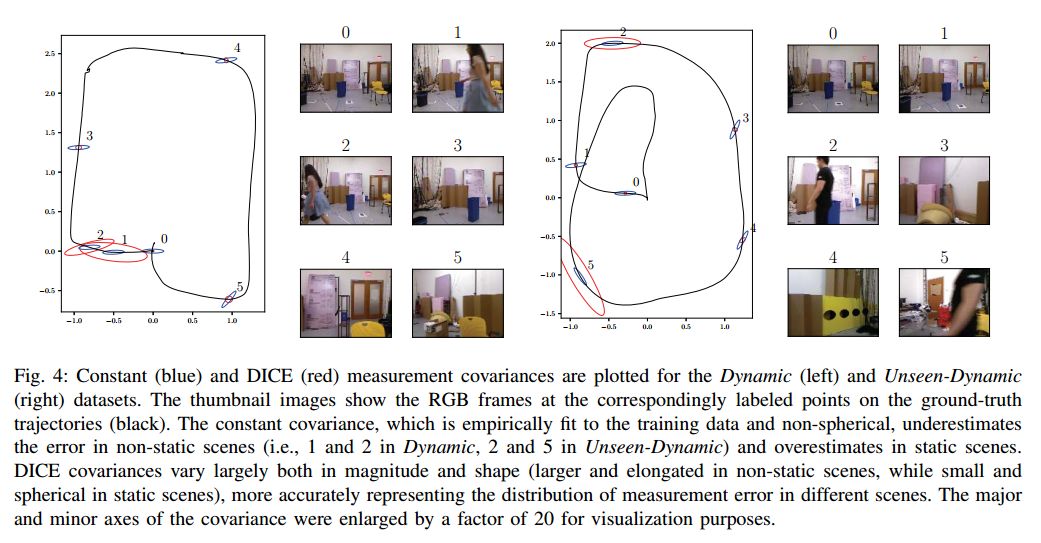
图4 针对动态(左)和不可见动态(右)数据集绘制恒定(蓝色)和DICE(红色)测量协方差。缩略图图像显示真实值轨迹(黑色)上相应标记点处的RGB帧。根据经验拟合训练数据和非球面的恒定协方差低估了非静态场景中的误差(即动态中的1和2,看不见动态中的2和5)以及静态场景中的高估。DICE协方差在幅度和形状上都有很大差异(非静态场景中较大和较长,静态场景中较小和球形),更准确地表示不同场景中测量误差的分布。为了可视化目的,协方差的主轴和副轴被放大了20倍。
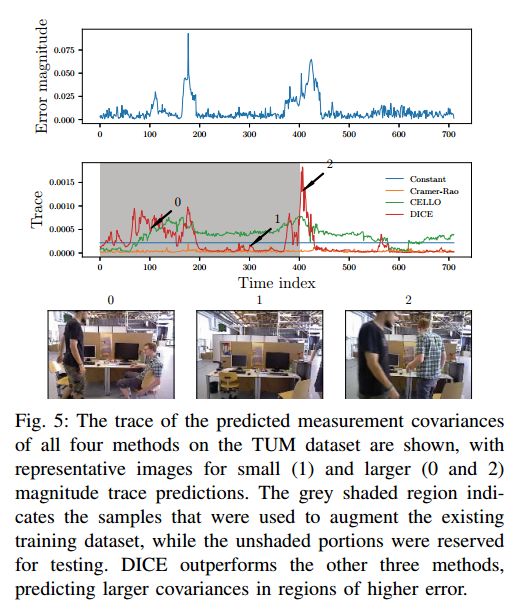
图5 显示了TUM数据集上所有四种方法的预测测量协方差的轨迹,其中代表性图像用于小(1)和更大(0和2)幅度轨迹预测。灰色阴影区域表示用于增强现有训练数据集的样本,而非阴影部分保留用于测试。DICE优于其他三种方法,预测较高误差区域的协方差较大
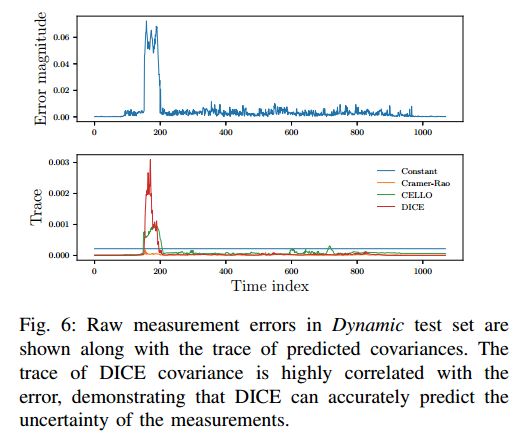
图6 显示动态测试集中的原始测量误差以及预测协方差的轨迹。DICE协方差的轨迹与误差高度相关,证明DICE可以准确地预测测量的不确定性
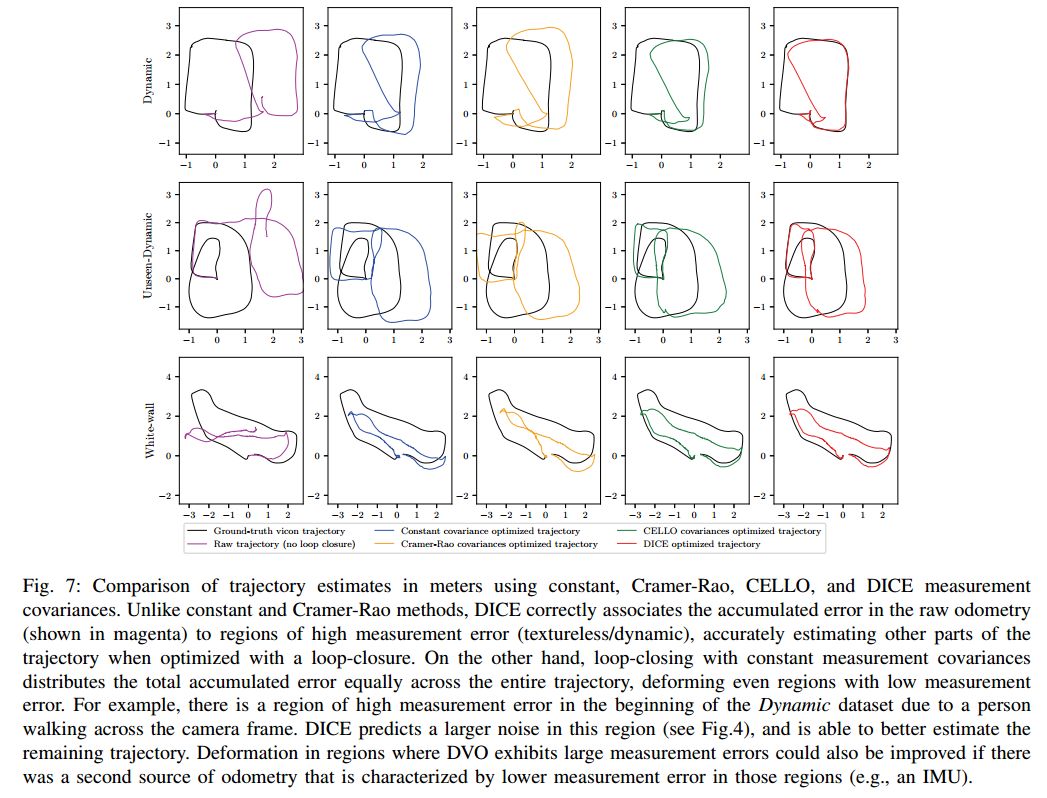
图7 使用常数,Cramer-Rao,CELLO和DICE测量协方差以米为单位的轨迹估计的比较。与常量和Cramer-Rao方法不同,DICE正确地将原始测距中的累积误差(以洋红色显示)与高测量误差区域(无纹理/动态)相关联,在使用闭环优化时精确估计轨迹的其他部分。另一方面,具有恒定测量协方差的闭环在整个轨迹上均匀地分布总累积误差,从而使具有低测量误差的区域变形。例如,由于人走过相机框架,在动态数据集的开头存在高测量误差的区域。DICE预测该区域的噪声较大(见图4),并且能够更好地估计剩余轨迹。如果存在以这些区域(例如,IMU)中的较低测量误差为特征的第二测距来源,则还可以改善DVO表现出大测量误差的区域中的变形
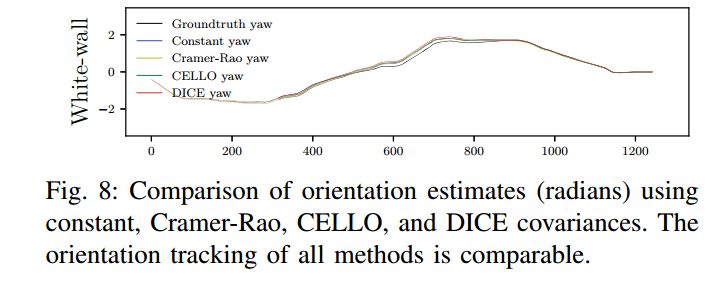
图8 使用常数,Cramer-Rao,CELLO和DICE协方差比较方向估计(弧度)。所有方法的方向跟踪都是可比较的

Abstract
We present a novel method of measurement covariance estimation that models measurement uncertainty as a function of the measurement itself. Existing work in predictive sensor modeling outperforms conventional fixed models, but requires domain knowledge of the sensors that heavily influences the accuracy and the computational cost of the models. In this work, we introduce Deep Inference for Covariance Estimation (DICE), which utilizes a deep neural network to predict the covariance of a sensor measurement from raw sensor data. We show that given pairs of raw sensor measurement and groundtruth measurement error, we can learn a representation of the measurement model via supervised regression on the prediction performance of the model, eliminating the need for handcoded features and parametric forms. Our approach is sensoragnostic, and we demonstrate improved covariance prediction on both simulated and real data.
如果你对本文感兴趣,请点击点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘提取码:bbji
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



