【泡泡点云时空】GeoNet:基于测地距离的点云分析深度网络
泡泡点云时空,带你精读点云领域顶级会议文章
标题:GeoNet: Deep Geodesic Networks for Point Cloud Analysis
作者:Tong He, Haibin Huang, Li Yi, Yuqian Zhou, Chihao Wu, Jue Wang, Stefano Soatto
来源:arxiv 2019
编译:程淏
审核:徐二帅,吕佳俊
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

测地距离(曲面上两点间距离最短的曲线长度)为物体的语义分析及几何建模,提供了强有力的线索。然而,这一信息在点云中丢失了。基于此,文中引入了GeoNet,该网络框架可对点云的内在结构建模。为了验证学习测地距离的适用性,文中提出了融合方案,将GeoNet与其他基线或主干网络(如PU-Net和PointNet++)结合使用,并用于后续的点云分析。作者通过该方法,改进了多个代表性任务的已有方法,包括点云上采样、点云法向量估计、网格重建及非刚性形状分类(non-rigid shape classification)。得益于对基础表面拓扑结构的理解,改进后效果优于目前现有的方法。
主要贡献
本文主要贡献如下:
1. 提出了一种新的深度学习框架GeoNet,用于学习点云中的测地距离空间拓扑结构,其反映了点云表面的内在结构;
2. 为了证明这种拓扑估计网络的适用性,文中提出了融合方法,将GeoNet引入到涉及点云分析的主流方案中;
3. 基于该测地距离融合方法使用公开数据集对多个几何和语义任务进行测试,包括点云上采样、点云法向估计、网格重建和非刚性形状分类,结果优于现有方法。
算法简介
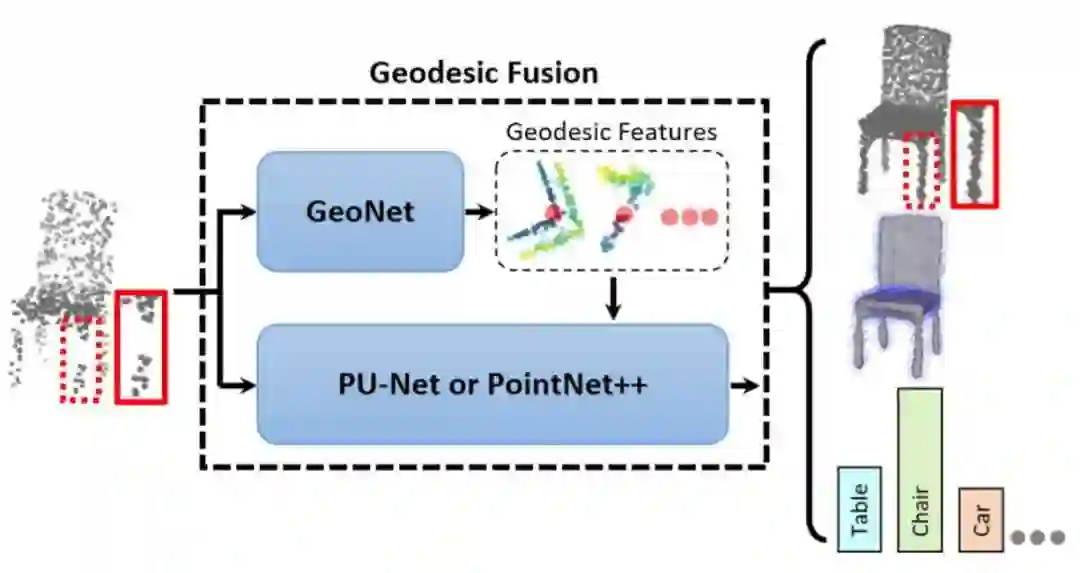
图1,该方法以点云作为输入,输出用于多种任务,包括上采样、点云法向估计、网格重构和形状分类。
确定点云中各点之间的邻域关系(即拓扑估计)十分重要,它指明了点云的底层结构,可以进一步揭示点云的语义和功能。以图1中的红色区域为例:这两组点虽然看似不相连,但实际上应该连接在一起,形成一条支撑整个椅子的椅子腿。另一方面,椅子座位两侧相对的点虽然在空间上非常接近,但不应相互连接,以免混淆可坐的上表面和不可坐的下表面。确定这样的拓扑看起来是一个非常底层的工作,但实际上它需要全局的、高层次的知识,这使得它成为一个非常具有挑战性的任务。文中采用学习方法来捕捉点云中的拓扑结构。

图2,GeoNet测地距离邻域估计网络。
邻域测地距离估计网络(GeoNet),利用真实测地距离训练测地距离表示。GeoNet由两个部分组成:特征提取层为每个点提取特征向量,测地线匹配层(GM),用于由潜在特征估计测地距离邻域。通过训练,GM层的中包含丰富的点云拓扑信息和内在的表面信息。这种表示法虽然以测地距离为训练对象,但并不产生测地距离具体信息。其目的是为后续阶段提供拓扑信息,而非用于度量计算。
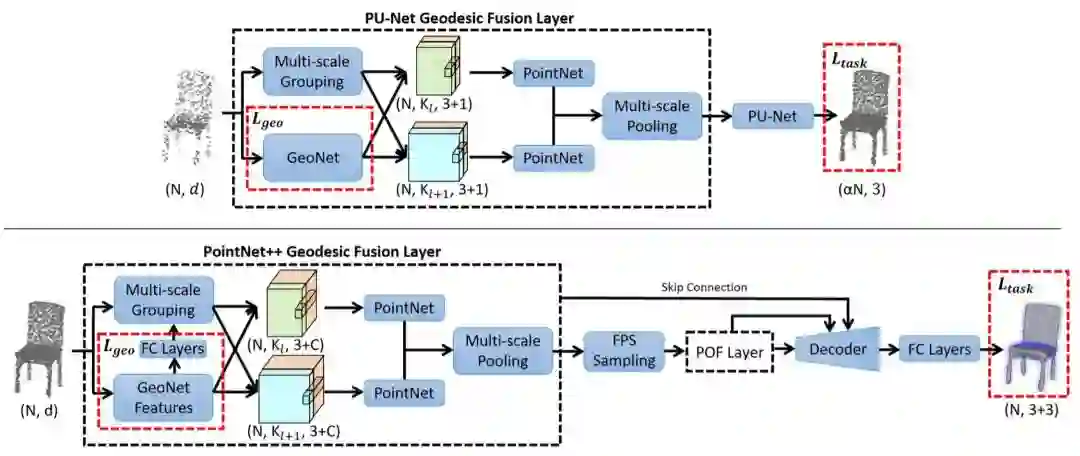
图3,PU-Net及PointNet++测地距离融合框架。
将GeoNet融合到针对不同任务设计的现有网络框架中。具体来说,文中提出了用于点云上采样的PUF融合(PUF)以及用于点云法向估计、网格重建以及非刚性形状分类的PointNet++融合(POF)。通过实验,证明了从GeoNet中训练得到的测地距离表示对几何和语义点云分析都是有益的。
主要结果

图5,点云上采样任务中,PU-Net与文中改进方法PUF的结果比较。
由于测地距离邻域比欧几里得邻域的拓扑结构信息更优,因此PUF上采样产生的异常值更少,并能恢复更多细节,如曲线和尖锐结构。
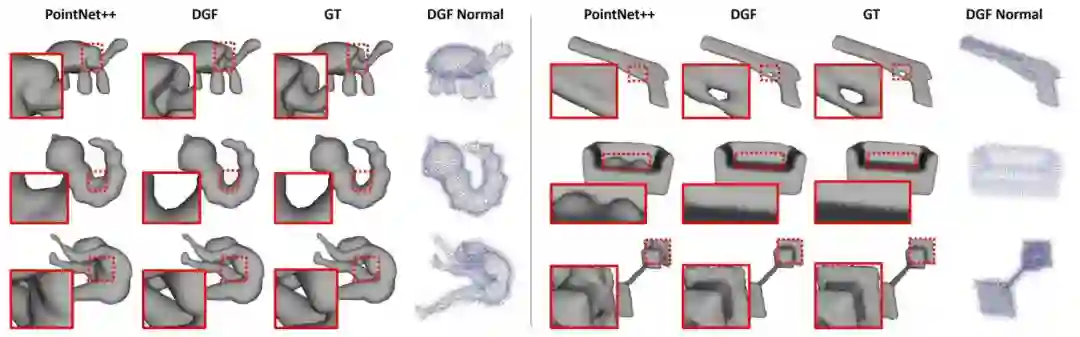
图7,在Shrec15(左)和ShapeNet(右)数据集上使用PointNet++和文中方法POF估计法线及网格重构结果比较。

Abstract
Surface-based geodesic topology provides strong cues for object semantic analysis and geometric modeling. However, such connectivity information is lost in point clouds. Thus we introduce GeoNet, the first deep learning architecture trained to model the intrinsic structure of surfaces represented as point clouds. To demonstrate the applicability of learned geodesic-aware representations, we propose fusion schemes which use GeoNet in conjunction with other baseline or backbone networks, such as PU-Net and PointNet++, for down-stream point cloud analysis. Our method improves the state-of-the-art on multiple representative tasks that can benefit from understandings of the underlying surface topology, including point upsampling, normal estimation, mesh reconstruction and non-rigid shape classification.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com