【泡泡一分钟】通过平移搜索匹配旋转不变特征的高效全局点云配准
每天一分钟,带你读遍机器人顶级会议文章
标题:Efficient Global Point Cloud Registration by Matching Rotation Invariant Features Through Translation Search
作者:Yinlong Liu, Chen Wang, Zhijian Song, Manning Wang
来源:Proceedings of the European Conference on Computer Vision (ECCV 2018)
编译:孙钦
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

三维刚性点云配准在计算机视觉和机器人技术中有许多应用。当相对变换较大或重叠率较小时,局部方法往往会失败,从而需要全局方法。大多数现有的全局方法在SE(3)的6D参数空间上使用BnB优化。这种方法通常非常慢,因为BnB优化的时间复杂度在参数空间中的维度是呈指数的。
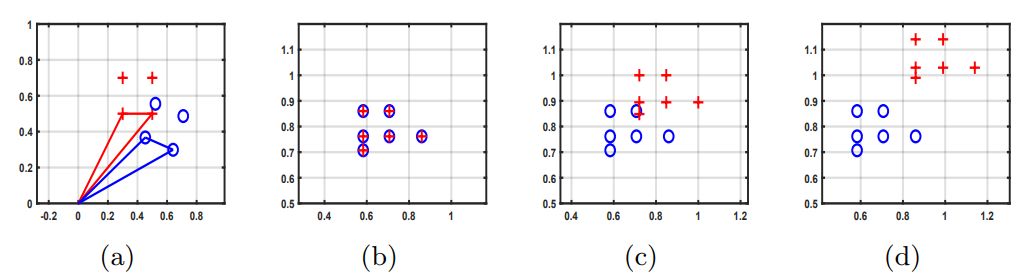
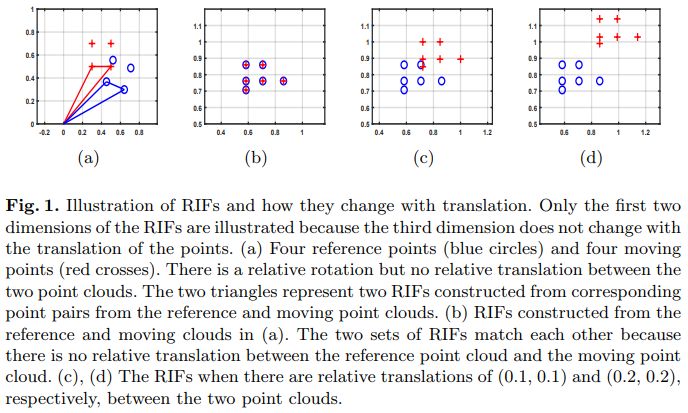
图1:RIF(Rotation Invariant Feature,旋转不变特征)图示,图中仅显示了RIF的前两个维度,因为第三维度不随点的平移而变化。(a)四个参考点(蓝色圆圈)和四个移动点(红色十字),两个点云之间存在相对旋转但没有相对平移。两个三角形表示从参考点云和移动点云的对应点对构造的两个RIF。(b)是由(a)中的参考和移动点构成的RIF。两组RIF彼此匹配,因为参考点云和移动点云之间没有相对平移。(c)(d)当两个点云之间分别存在(0.1,0.1)和(0.2,0.2)的相对平移时的RIF。
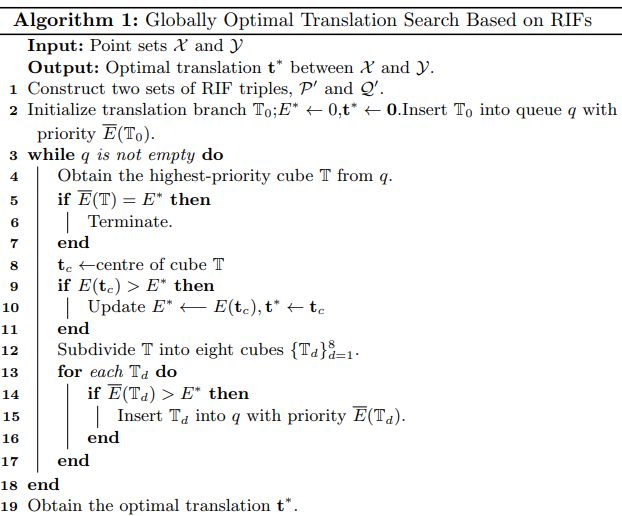
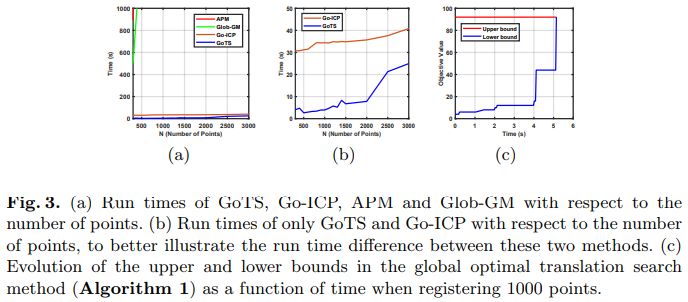
本文作者解耦了对平移和旋转的优化,并且首次提出了一种全局优化3D平移参数的快速BnB算法。利用该BnB算法计算全局最优的平移参数,然后再计算最优旋转参数。
算法流程:
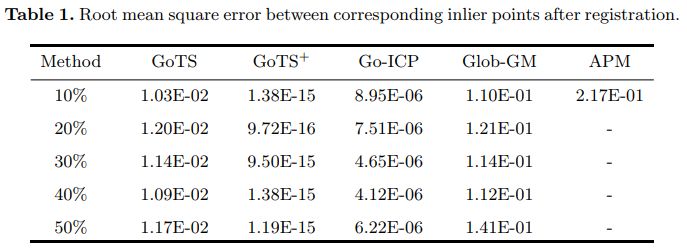
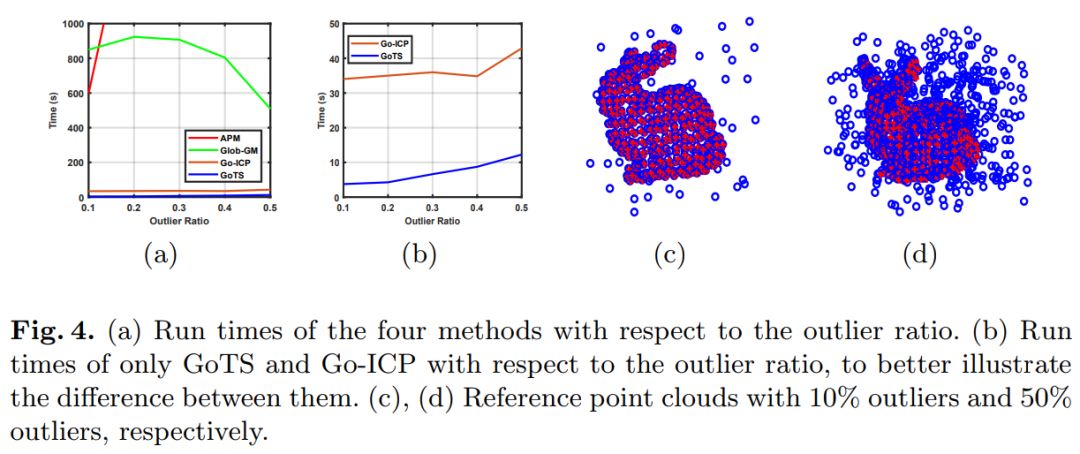
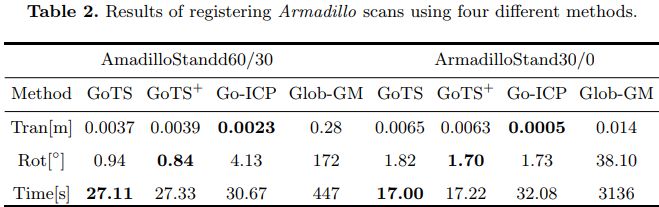
通过使用新提出的旋转不变特征对平移和旋转单独优化。对具有挑战性的数据集的实验表明,本文提出的方法在速度和准确性方面都优于最先进的全局方法。
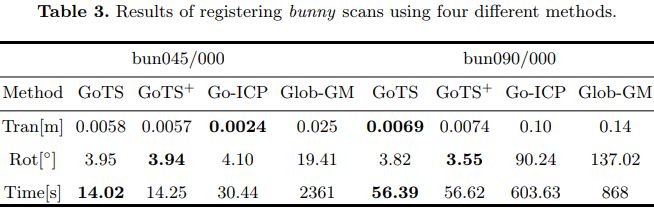
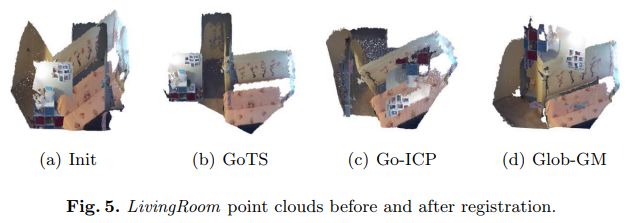
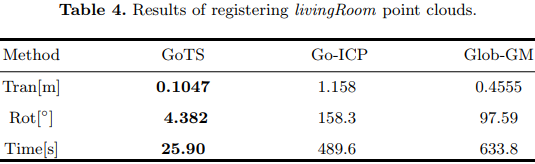
实验比较(其中GoTS是本文的方法,GoTS+方法在GoTS的基础上做了改进):

Abstract
Three-dimensional rigid point cloud registration has manyapplications in computer vision and robotics. Local methods tend to fail,causing global methods to be needed, when the relative transformationis large or the overlap ratio is small. Most existing global methods utilizeBnB optimization over the 6D parameter space of SE(3). Such methodsare usually very slow because the time complexity of BnB optimization isexponential in the dimensionality of the parameter space. In this paper,we decouple the optimization of translation and rotation, and we proposea fast BnB algorithm to globally optimize the 3D translation parameterfirst. The optimal rotation is then calculated by utilizing the global optimaltranslation found by the BnB algorithm. The separate optimizationof translation and rotation is realized by using a newly proposed rotationinvariant feature. Experiments on challenging data sets demonstratethat the proposed method outperforms state-of-the-art global methodsin terms of both speed and accuracy.Keywords: point cloud registration · global optimization · rotation invariantfeature
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com
消防小课堂
01
单选题
灭火器上的压力表指针指示在红色区域时表示___?
A.正常
B.偏高
C.偏低
02
多选题
若火灾必须穿烟气火场时,下列消防器材能起到重要作用的是___?
A.独立式感烟火灾探测报警器
B.过滤式消防自救呼吸器
C.手提式二氧化碳灭火器
D.灭火毯
E.强光手电