【泡泡一分钟】动态多相机集群的无编码万向节校准
每天一分钟,带你读遍机器人顶级会议文章
标题:Encoderless Gimbal Calibration of Dynamic Multi-Camera Clusters
作者:Christopher L. Choi, Jason Rebello, Leonid Koppel, Pranav Ganti, Arun Das, and Steven L. Waslander
来源:2018 IEEE International Conference on Robotics and Automation (ICRA)
编译:章绩伟
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

动态摄像机群集(DCC)是多摄像机系统,其中一个或多个摄像机安装在诸如万向节的致动机构上。用于DCC标定的现有方法依赖于关节角度测量来解决动态和静态相机之间的时变变换。这些信息通常由电机编码器提供,但是,现有的机制并不总能提供关节角度测量。在本文中,我们提出了一种用于DCC校准的无编码器方法,它同时估算变换链的运动学参数以及未知的关节角度。我们还展示了无编码万向节机构与最先进的VIO算法的集成,并展示了为了同时在线估计关节角度和车辆定位状态所需的扩展。在模拟和由安装在UAV上的2-DOF万向节组成的物理DCC上验证了方法。最后,我们展示了集成到OKVIS VIO软件包中的校准机制的实验结果,并展示了成功的在线关节角度估计,同时保持了与标准静态多摄像机配置相当的定位精度。
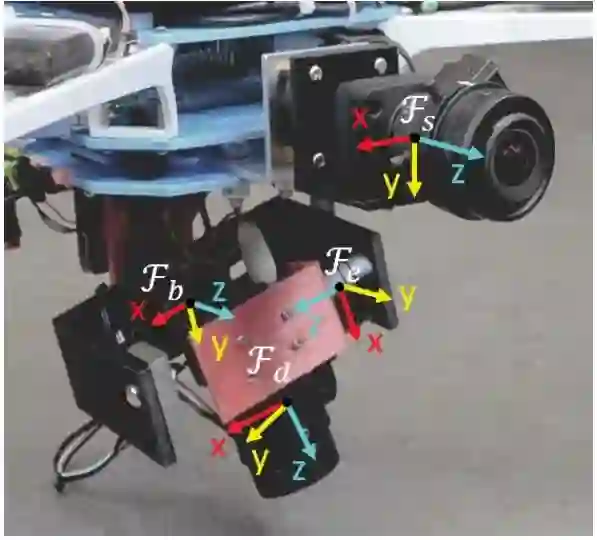
图1 基于2-DOF万向节的DCC的坐标系图。Fs,Fd,Fb,Fe分别代表静态相机,动态相机,机构基座和机构末端效应器坐标系。IMU安装在动态摄像机的背面,用于万向节的图像稳定和估计近似关节角度以初始化无编码器校准。
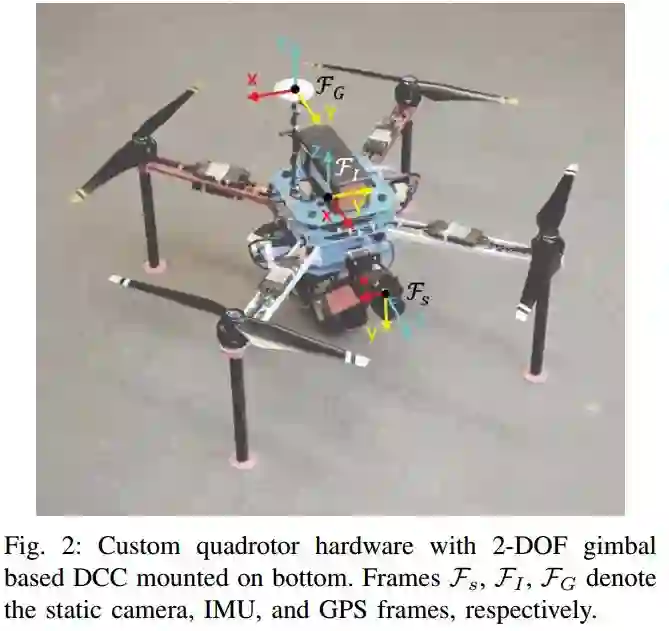
图2 典型的四旋翼硬件,底部安装有2自由度万向节DCC。Fs,FI,FG分别表示静态相机,IMU和GPS坐标系。
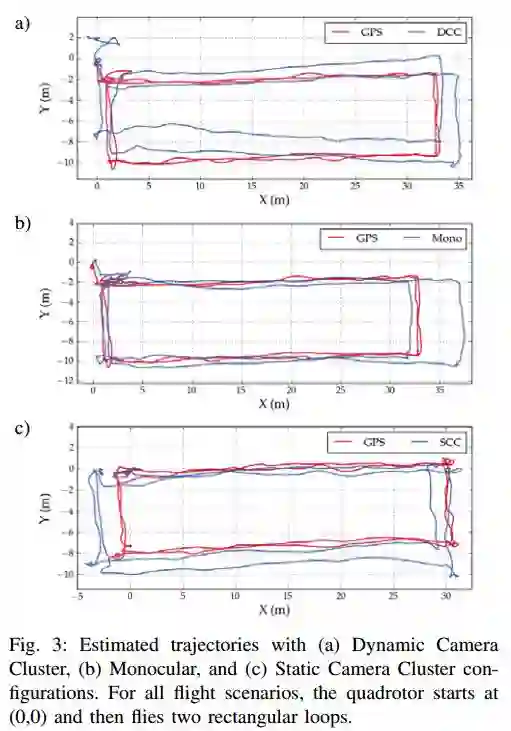
图3 估计的轨迹与(a)动态摄像机群集,(b)单目镜像和(c)静态摄像机群集配置。对于所有飞行场景,四旋翼飞行器从(0,0)开始,然后飞行两个矩形环。
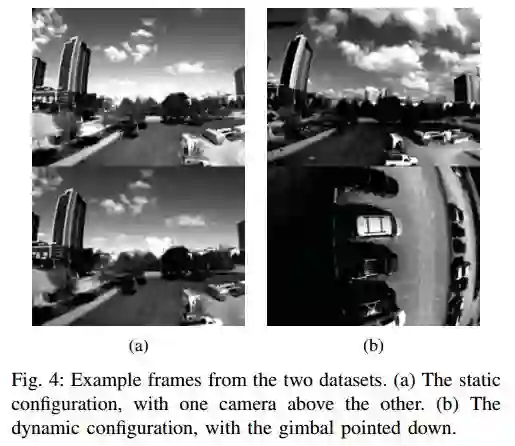
图4 来自两个数据集的示例帧。(a)静态配置,一个摄像头在另一个之上。(b)动态配置,云台指向下方。
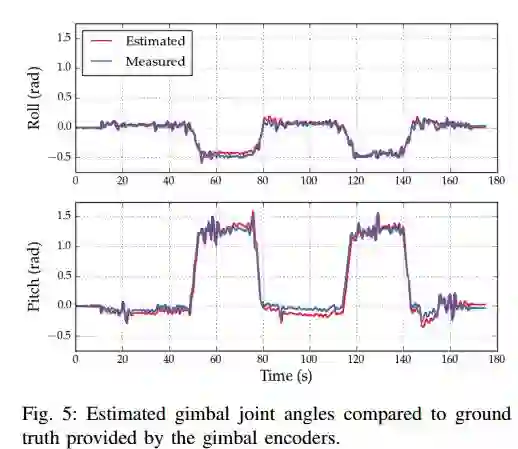
图5 估计的万向节关节角度与万向节编码器提供的真实值相比。

Abstract
Dynamic Camera Clusters (DCCs) are multicamera systems where one or more cameras are mounted on actuated mechanisms such as a gimbal. Existing methods for DCC calibration rely on joint angle measurements to resolve the time-varying transformation between the dynamic and static camera. This information is usually provided by motor encoders, however, joint angle measurements are not always readily available on off-the-shelf mechanisms. In this paper, we present an encoderless approach for DCC calibration which simultaneously estimates the kinematic parameters of the transformation chain as well as the unknown joint angles. We also demonstrate the integration of an encoderless gimbal mechanism with a state-of-the art VIO algorithm, and show the extensions required in order to perform simultaneous online estimation of the joint angles and vehicle localization state. The proposed calibration approach is validated both in simulation and on a physical DCC composed of a 2-DOF gimbal mounted on a UAV. Finally, we show the experimental results of the calibrated mechanism integrated into the OKVIS VIO package, and demonstrate successful online joint angle estimation while maintaining localization accuracy that is comparable to a standard static multi-camera configuration.
如果你对本文感兴趣,请点击点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘提取码:epo5
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com