【泡泡一分钟】Pop-up SLAM:针对弱纹理环境的语义单目平面SLAM
每天一分钟,带你读遍机器人顶级会议文章
标题:Pop-up SLAM: Semantic Monocular Plane SLAM for Low-texture Environments
作者:Shichao Yang, Yu Song, Michael Kaess, and Sebastian Scherer
来源:International Conference on Intelligent Robots and Systems IEEE, 2016
播音员:四姑娘
编译:赵搏欣
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

今天为大家带来的文章是Pop-up SLAM: Semantic Monocular Plane SLAM for Low-texture Environments ——针对弱纹理环境的语义单目平面SLAM,该文章选自ICIRS2016。
现有的SLAM算法在弱纹理环境中定位性能较差,是由于该环境中的特征点较少,使得生成的稀疏或半密集地图包含的信息不足以准确的对摄像头进行运动估计。尽管有些文献中使用了平面或场景布局对稠密地图规则化,但他们仍需要从其他来源进行状态估计。本文中,我们提出一个实时的单目平面SLAM算法,验证了场景理解可以改善在弱纹理环境下的状态估计和稠密地图构建。平面的数据从一个立体三维平面模型中获得,我们也综合平面信息和基于点的SLAM框架来提高算法稳定性。通过TUM的公共数据库验证,本文算法能生成一个密集的语义3D模型,其中像素点深度误差为6.2厘米,而在同样情况下现有的SLAM算法则运行失败。在一个60米长带回环的数据库上测试,我们的方法能够给出一个更好的三维模型,状态估计误差为0.67%。
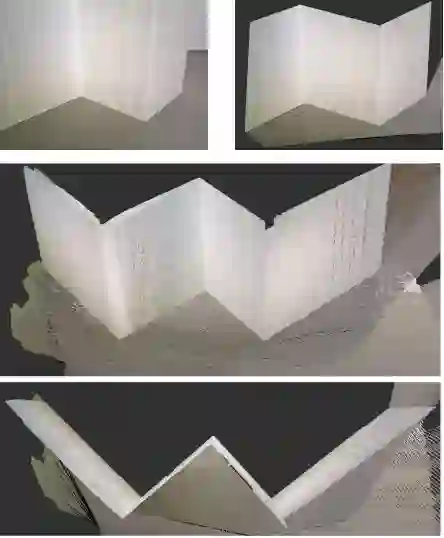
图1 在TUM弱纹理数据库中进行3D重构。(最上图)左图为原始单帧图像。右边为三维立体平面模型。(中间图)使用我们的立体平面SLAM算法实现的密集重构,其中每个平面都有一个标签,显示是墙面或是地面。(最下图)该三维模型的俯视图。当使用现有SLAM算法重构失败。
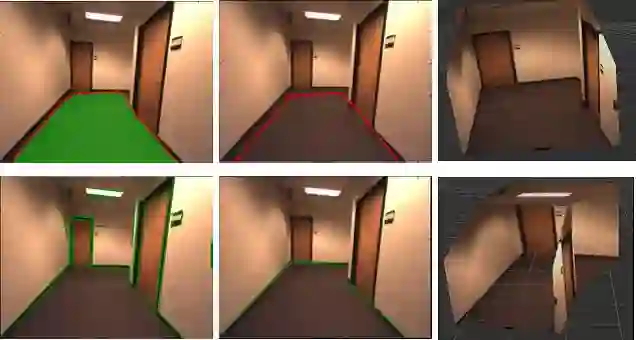
图2 单幅图像的立体平面模型。(上图)文献[4]原始算法,从左到右依次是:CNN分割,折线拟合,立体三维模型。(底图)改进后的方法,从左到右依次是:直线段检测,地面墙面边缘检测,立体三维模型。对地面边缘更好的检测和摄像头姿态估计使得生成的三维模型更加准确。
Abstract
Existing simultaneous localization and mapping (SLAM) algorithms are not robust in challenging low-texture environments because there are only few salient features. The resulting sparse or semi-dense map also conveys little information for motion planning. Though some work utilize plane or scene layout for dense map regularization, they require decent state estimation from other sources. In this paper, we propose real-time monocular plane SLAM to demonstrate that scene understanding could improve both state estimation and dense mapping especially in low-texture environments. The plane measurements come from a pop-up 3D plane model applied to each single image. We also combine planes with point based SLAM to improve robustness. On a public TUM dataset, our algorithm generates a dense semantic 3D model with pixel depth error of 6.2 cm while existing SLAM algorithms fail. On a 60 m long dataset with loops, our method creates a much better 3D model with state estimation error of 0.67%.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
回复关键字“20180128”,即可获取本文下载链接。

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





