2020 神经网络架构搜索(NAS)最新技术综述

极市导读
近年来有关NAS的优秀的工作层出不穷,分别从不同的角度来提升NAS算法。为了让初学者更好的进行NAS相关的研究,本文从其产生的背景到未来的发展方向,全面而系统的综述了NAS的挑战和解决方案。>>加入极市CV技术交流群,走在计算机视觉的最前沿
【内容速览】你可能感兴趣的内容:
-
NAS是什么?由什么组成?常用算法是什么?
-
Add操作要比concate操作更加有效。
-
宽而浅的单元(采用channel个数多,但层数不多)在训练过程中更容易收敛,但是缺点是泛化性能很差。
-
能根据网络前几个epoch的表现就确定这个网络是否能够取得更高性能的预测器(性能预测)。
-
根据候选网络结构的表示就可以预测这个模型未来的表现(性能预测)。
-
分类的backbone和其他任务比如检测是存在一定gap的,最好的方式并不一定是微调,而可能是改变网络架构。
-
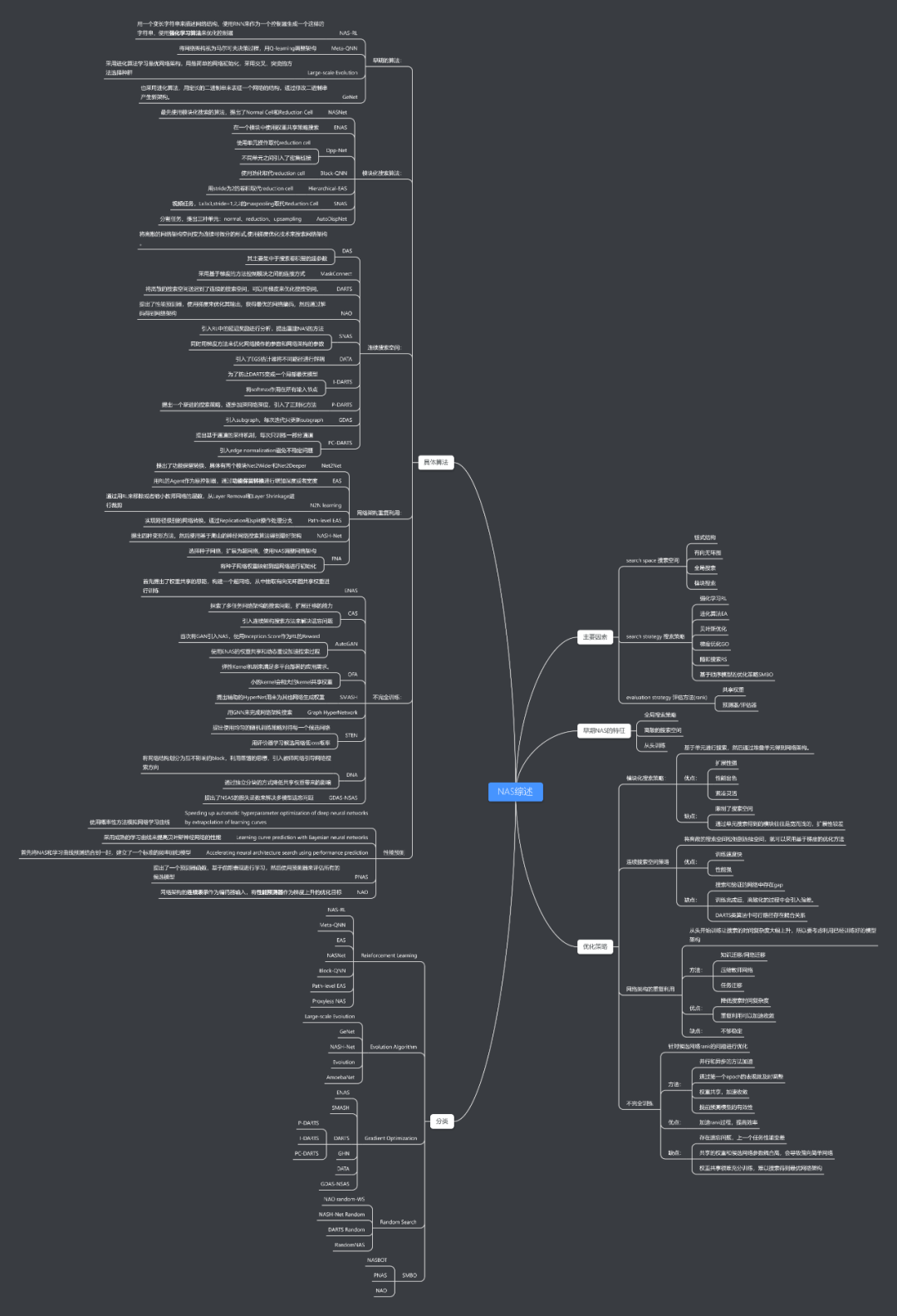
1. 背景 -
2. NAS介绍 -
3. 早期NAS的特征 -
3.1 全局搜索 -
3.2 从头搜索 -
4. 优化策略 -
4.1 模块搜索策略 -
4.2 连续的搜索空间 -
4.3 网络架构重复利用 -
4.4 不完全训练 -
5. 性能对比 -
6. 未来的方向 -
7. 结语 -
8. 参考文献
1. 背景
-
早期NAS算法的特点。 -
总结早期NAS算法中存在的问题。 -
给出随后的NAS算法对以上问题提出的解决方案。 -
对以上算法继续分析、对比、总结。 -
给出NAS未来可能的发展方向。
2. NAS介绍
-
identity -
卷积层(3x3、5x5、7x7) -
深度可分离卷积 -
空洞卷积 -
组卷积 -
池化层 -
Global Average Pooling -
其他
-
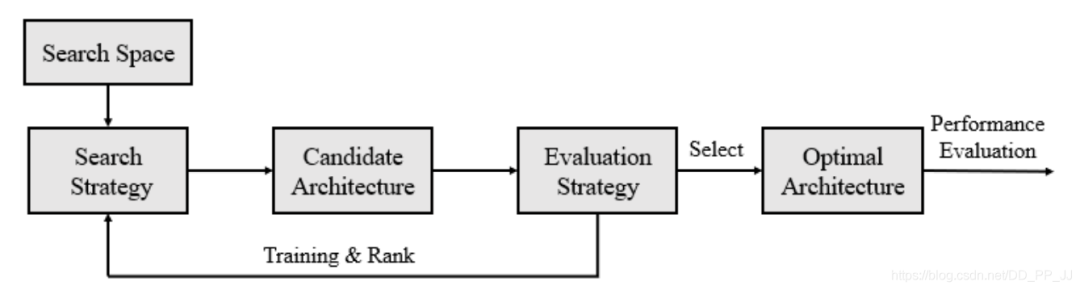
search space 如何定义搜索空间 -
search strategy 搜索的策略 -
evaluation strategy 评估的策略
3. 早期NAS的特征
-
找一些预定义的操作集合(eg 卷积、池化等)这些集合构成了Search Space搜索空间。 -
采用一定的搜索策略来获取大量的候选网络结构。 -
在训练集训练这些网络,并且在验证集测试得到这些候选网络的准确率。 -
这些候选网络的准确率会对搜索策略进行反馈,从而可以调整搜索策略来获得新一轮的候选网络。重复这个过程。 -
当终止条件达到(eg:准确率达到某个阈值),搜索就会停下来,这样就可以找到准确率最高对应的网络架构。 -
在测试集上测试最好的网络架构的准确率。
-
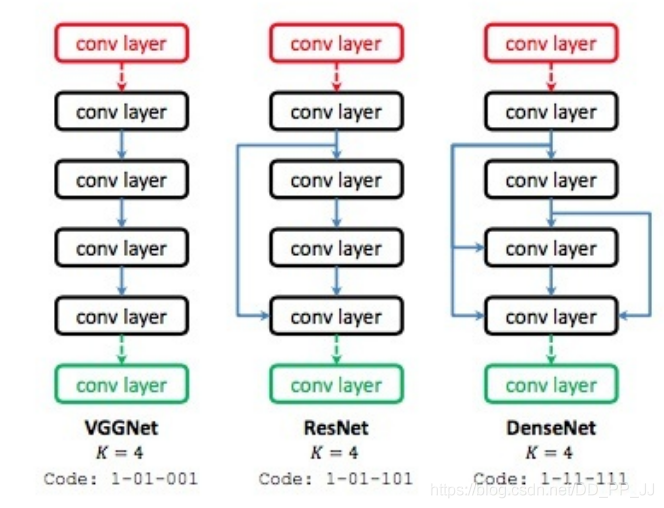
全局搜索策略:早期NAS采用的策略是搜索整个网络的全局,这就意味着NAS需要在非常大的搜索空间中搜索出一个最优的网络结构。搜索空间越大,计算的代价也就越大。 -
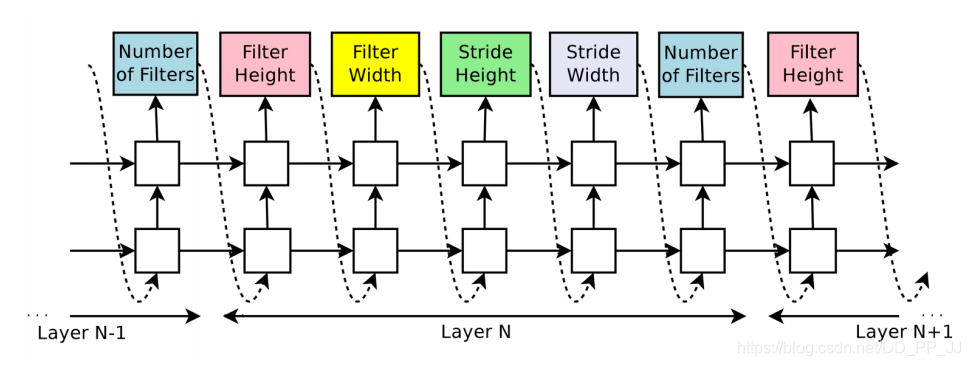
离散的搜索空间:早期NAS的搜索空间都是离散的,不管是用变长字符串也好,还是用二进制串来表示,他们的搜索空间都是离散的,如果无法连续,那就意味着无法计算梯度,也无法利用梯度策略来调整网络模型架构。 -
从头开始搜索:每个模型都是从头训练的,这样将无法充分利用现存的网络模型的结构和已经训练得到的参数。
3.1 全局搜索
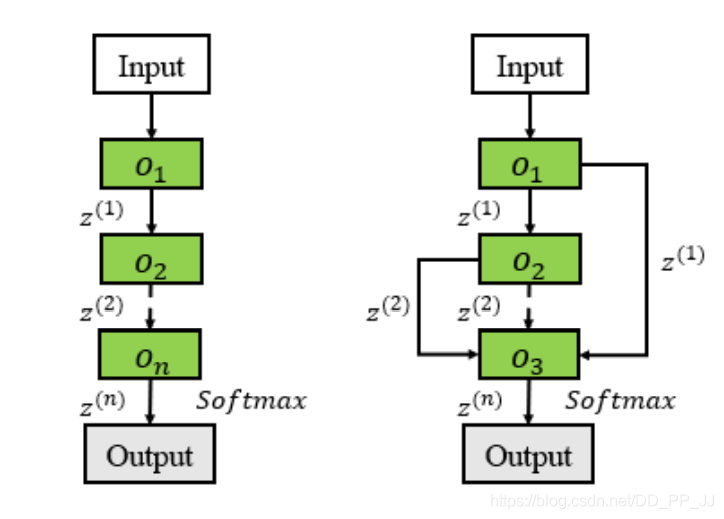
“ 注记:跳转连接往往可以采用多种方式进行特征融合,常见的有add, concate等。作者在文中提到了实验证明,add操作要比concate操作更加有效(原文:the sum operation is better than the merge operation)所以在NAS中,通常采用Add的方法进行特征融合操作。
3.2 从头搜索
4. 优化策略
4.1 模块搜索策略
-
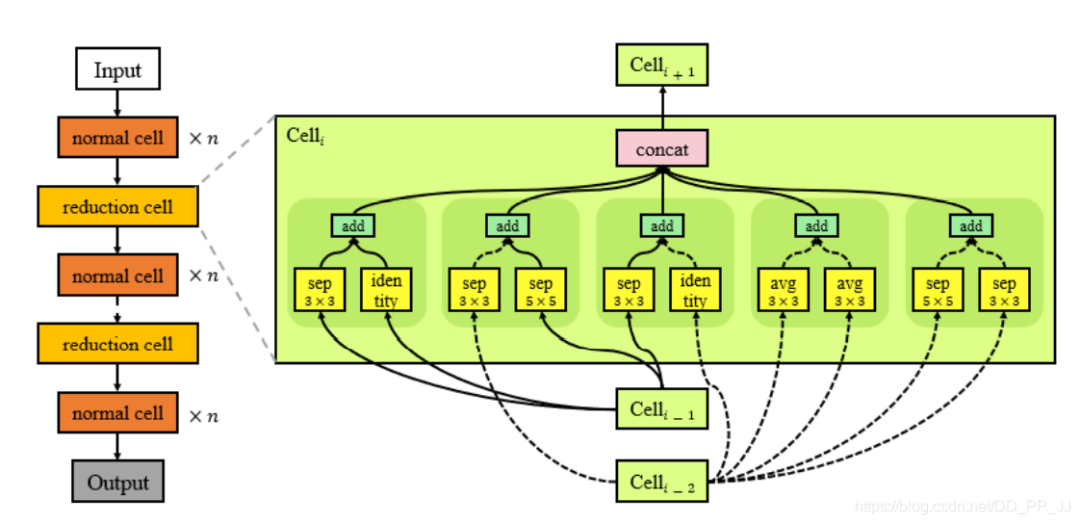
Normal Cell也就是正常模块,用于提取特征,但是这个单元不能改变特征图的空间分辨率。 -
Reduction Cell和池化层类似,用于减少特征图的空间分辨率。
-
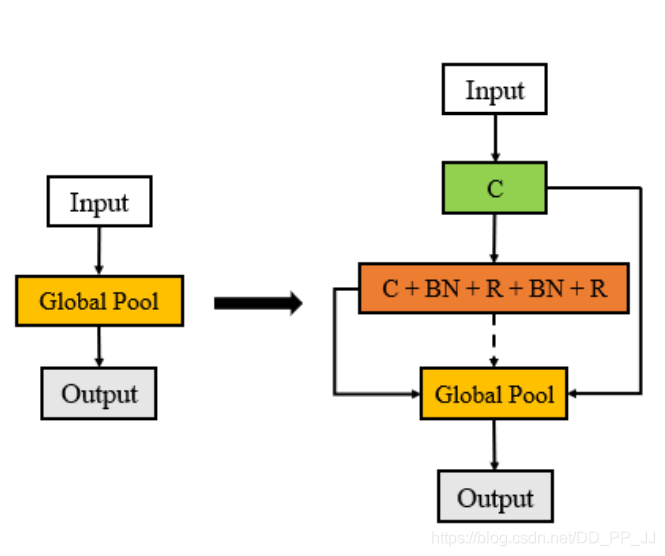
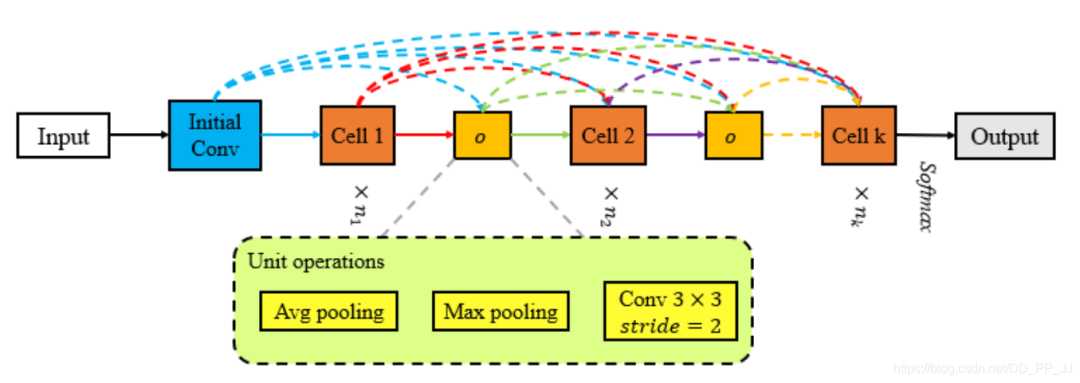
使用单元操作来取代reduction cell(reduction cell往往比较简单,没有必要搜索,采用下采样的单元操作即可,如下图Dpp-Net的结构)下图Dpp-Net中采用了密集连接。
-
Block-QNN中直接采用池化操作来取代Reduction cell -
Hierarchical-EAS中使用了3x3的kernel size, 以2为stride的卷积来替代Reduction Cell。 -
Dpp-Net采用平均池化操作取代Reduction Cell。同时采取了Dense连接+考虑了多目标优化问题。 -
在视频任务:SNAS使用了Lx3x3,stride=1,2,2的maxpooling取代Reduction Cell。 -
在分割任务:AutoDispNet提出了一个自动化的架构搜索技术来优化大规模U-Net类似的encoder-decoder的架构。所以需要搜索三种:normal、reduction、upsampling。
“ 注记:通过研究这些搜索得到的单元模块,可以得到以下他们的共性:由于现存的连接模式, 宽而浅的单元(采用channel个数多,但层数不多)在训练过程中更容易 收敛,并且更容易搜索,但是缺点是 泛化性能很差。
4.2 连续的搜索空间
-
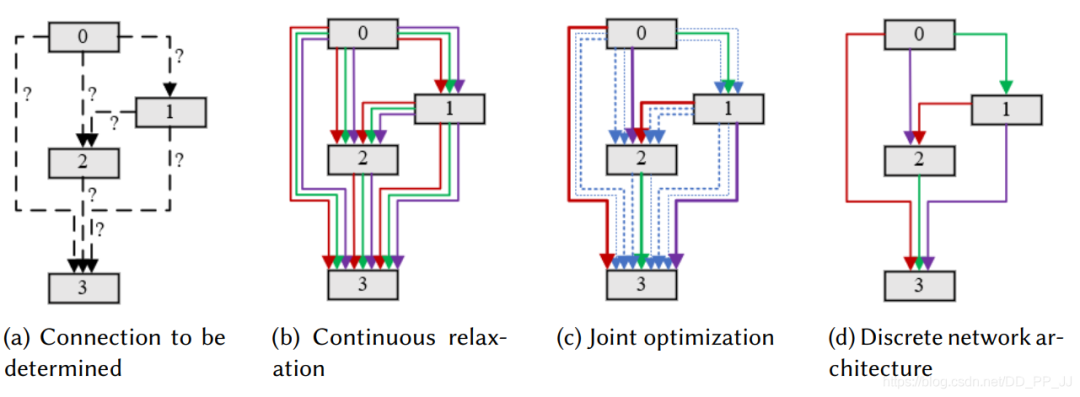
中间节点代表潜在的特征表达,并且和每个之前的节点都通过一个有向边操作。对一个离散的空间来说,每个中继节点可以这样表达:
-
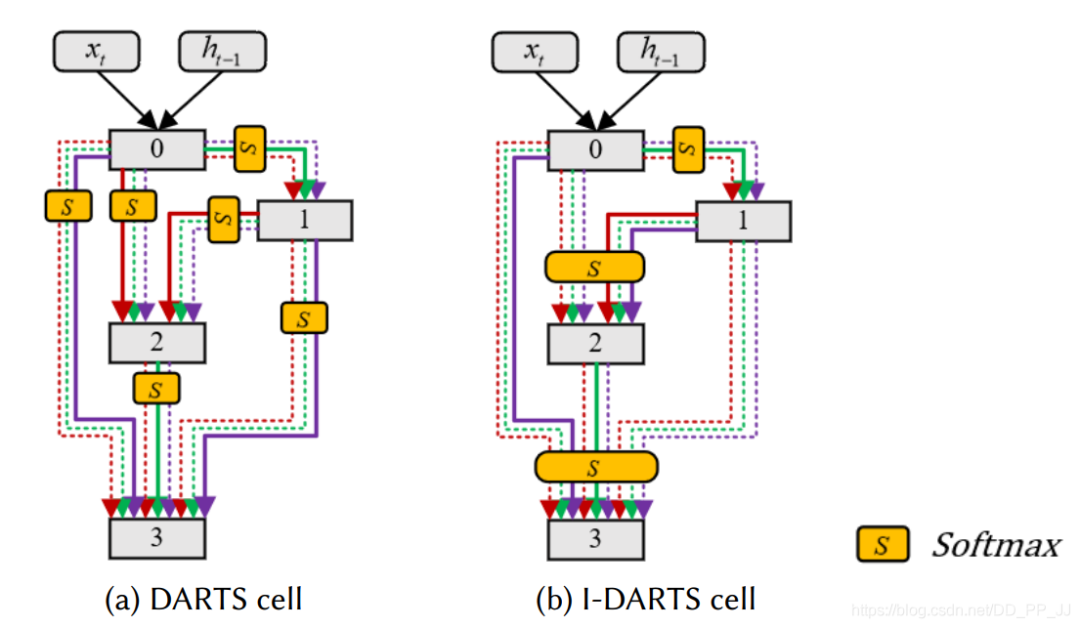
在DARTS中,通过一个类似softmax来松弛所有可能的操作,这样就将离散搜索空间转化为连续的搜索空间问题。
4.3 网络架构重复利用
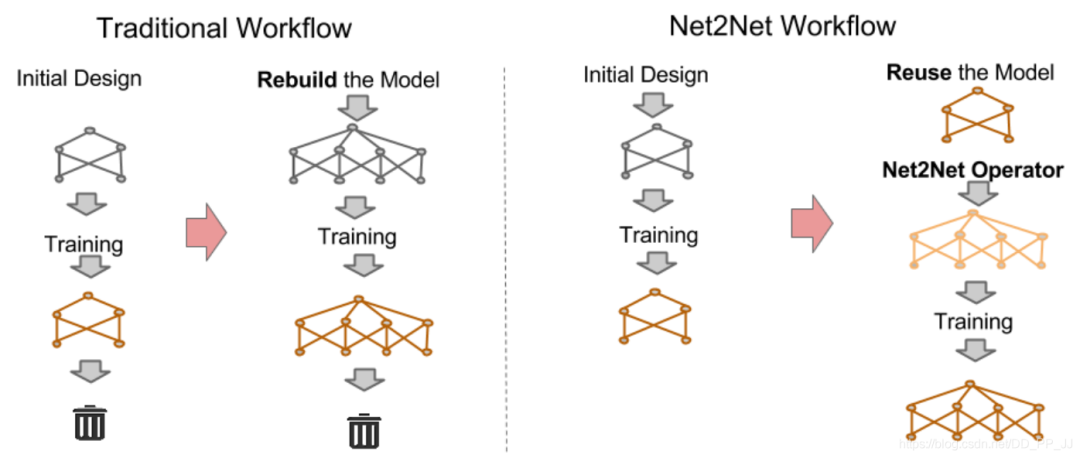

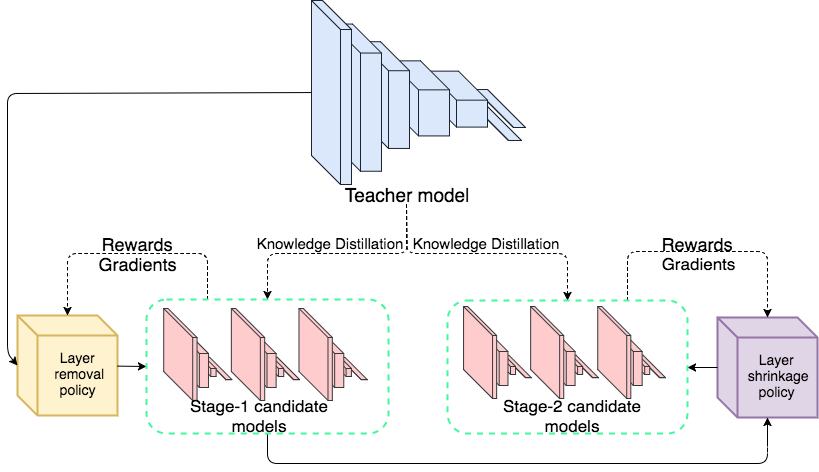
-
首先使用layer removal操作 -
然后使用layer shrinkage操作 -
使用强化学习来探索搜索空间 -
使用知识蒸馏的方法训练每个生成得到的网络架构。 -
最终得到一个局部最优的学生网络。
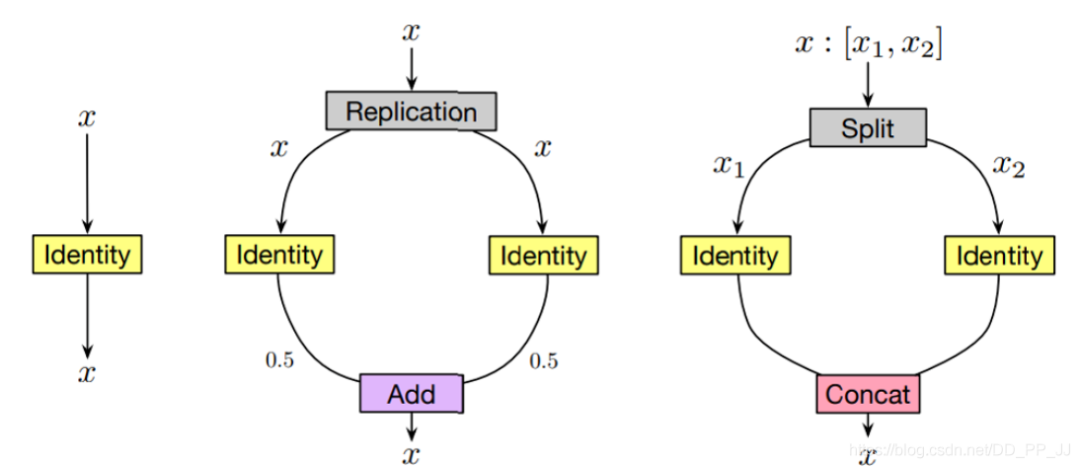
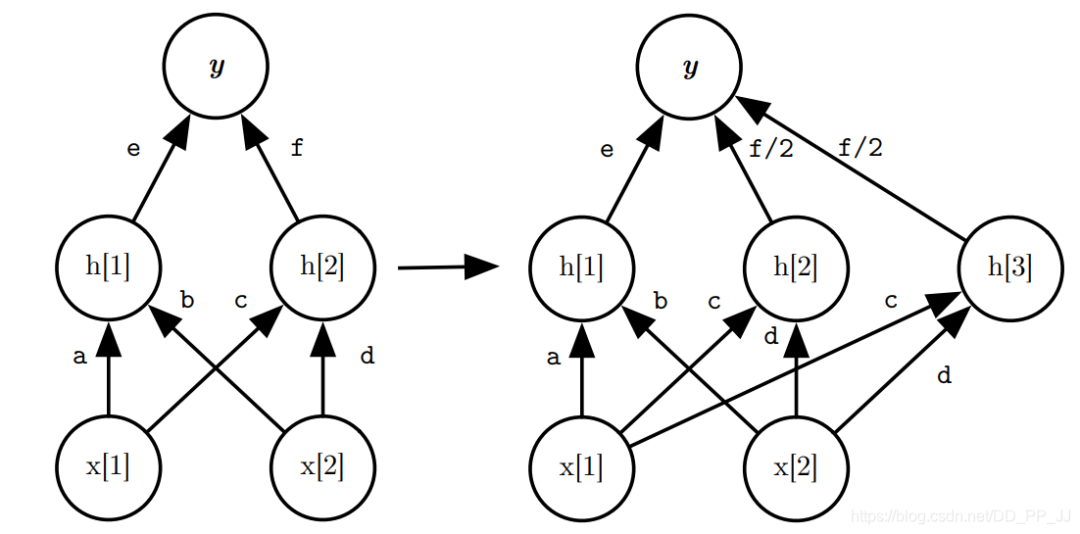
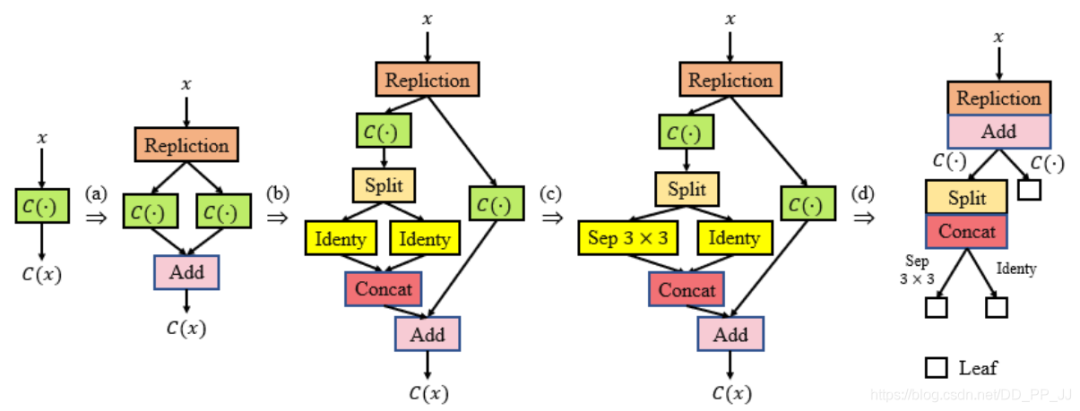
-
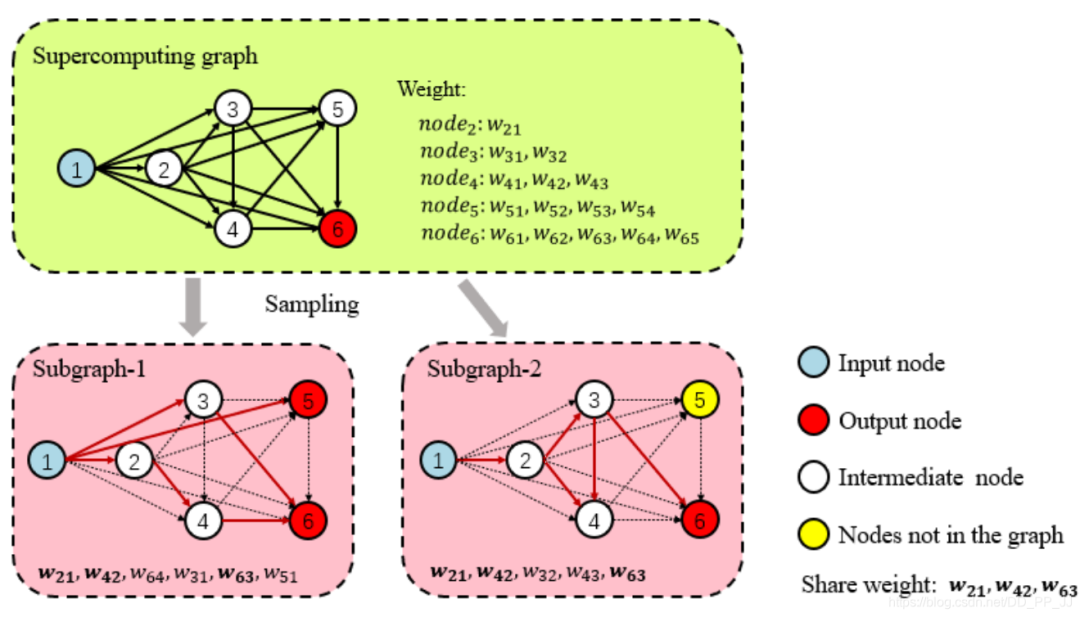
Replication就是将输入x复制两份,分别操作以后将得到的结果除以2再相加得到输出。 -
Split就是将x按照维度切成两份,分别操作以后,将得到的结果concate到一起。
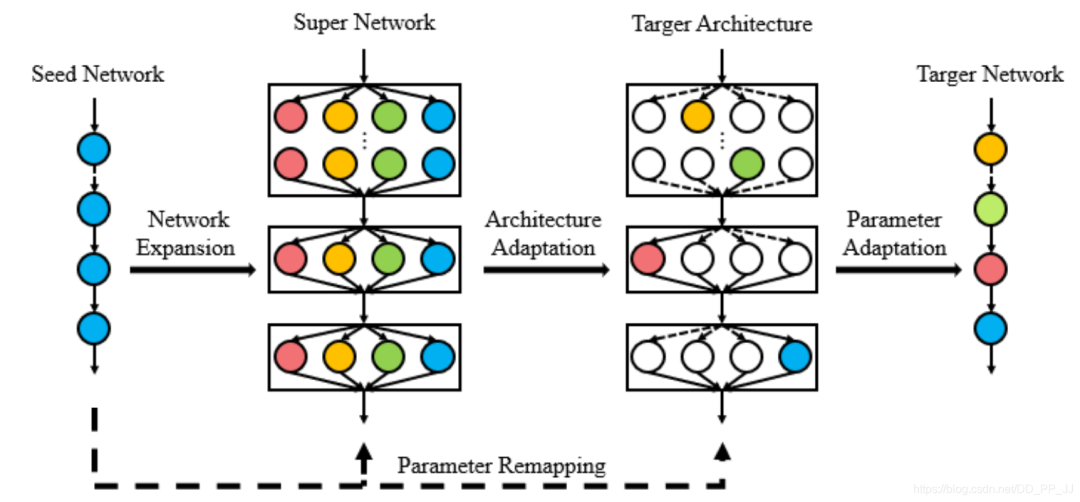
“ps: 分类backbone和其他任务是有一定gap的,FNA认为通过微调神经网络带来的收益不如调整网络结构带来的收益)
4.4 不完全训练
-
NAS-RL采用了并行和异步的方法来加速候选网络的训练 -
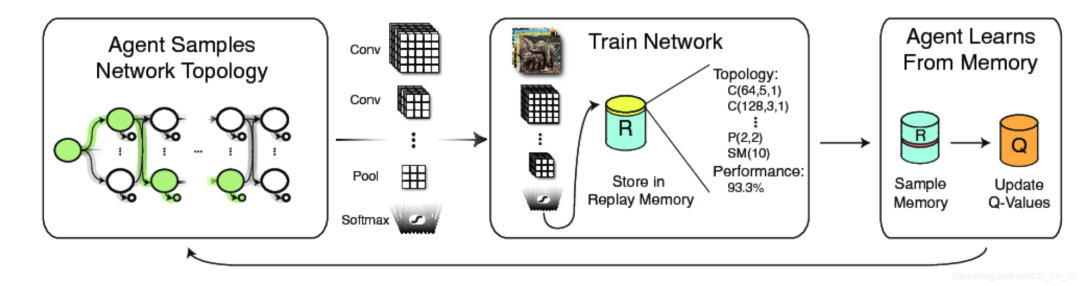
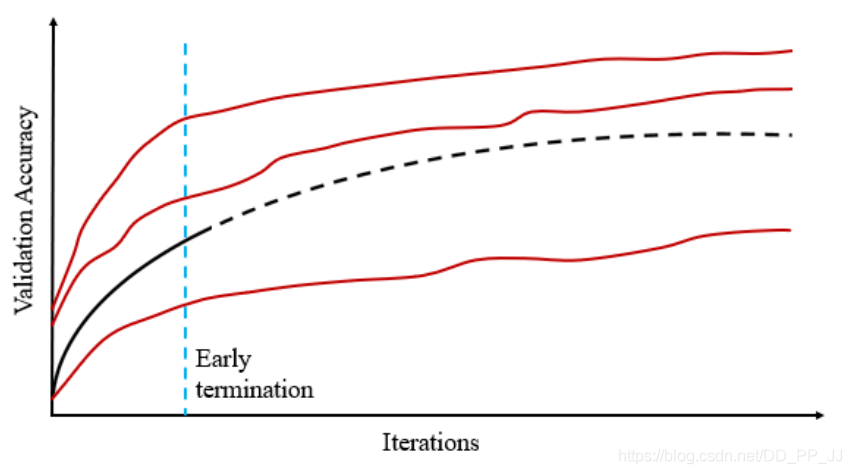
MetaQNN在第一个epoch训练完成以后就使用预测器来决定是否需要减少learning rate并重新训练。 -
Large-scale Evolution方法让突变的子网络尽可能继承父代网络,对于突变的结构变化较大的子网络来说,就很难继承父代的参数,就需要强制重新训练。
4.4.1 权重共享
4.4.2 训练至收敛
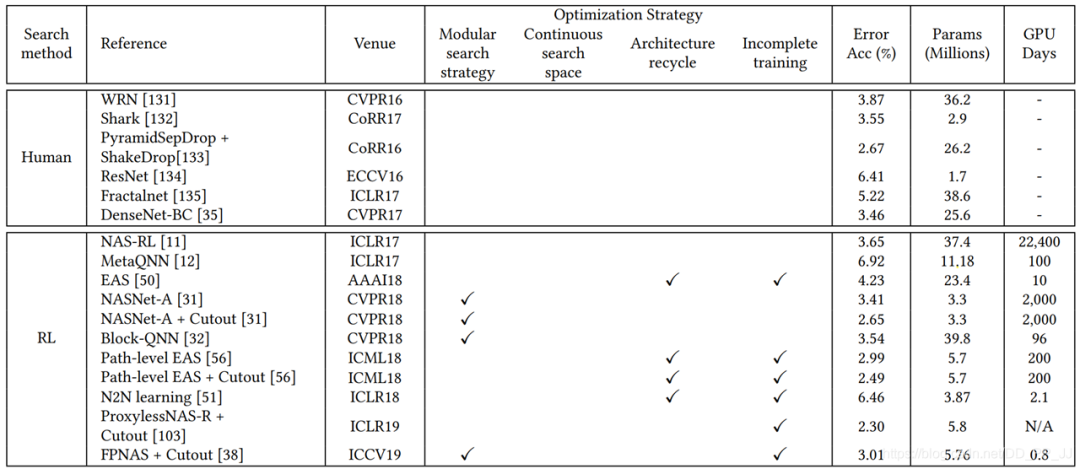
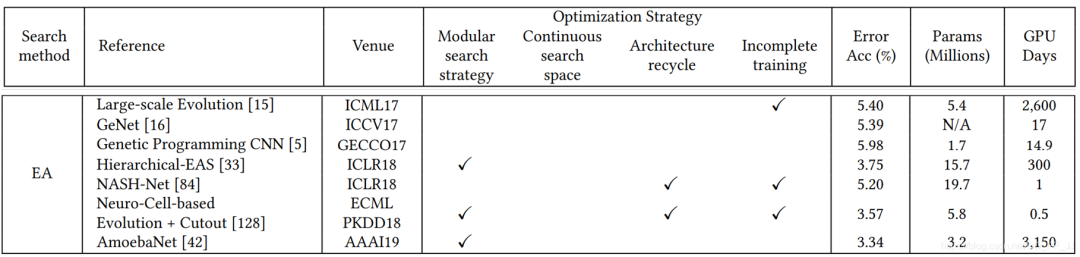
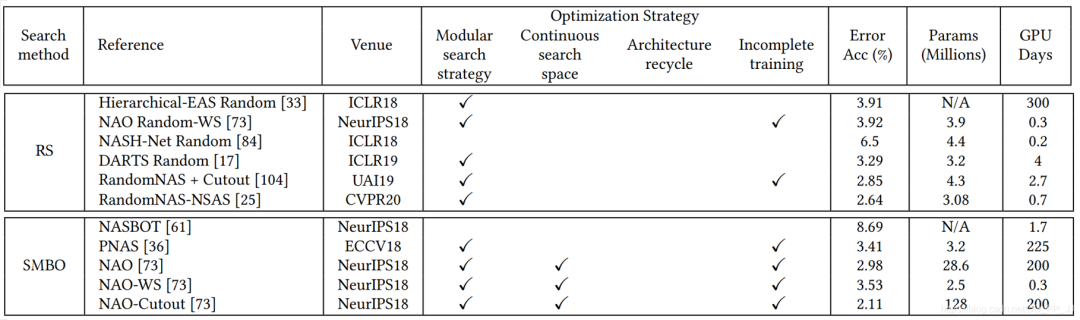
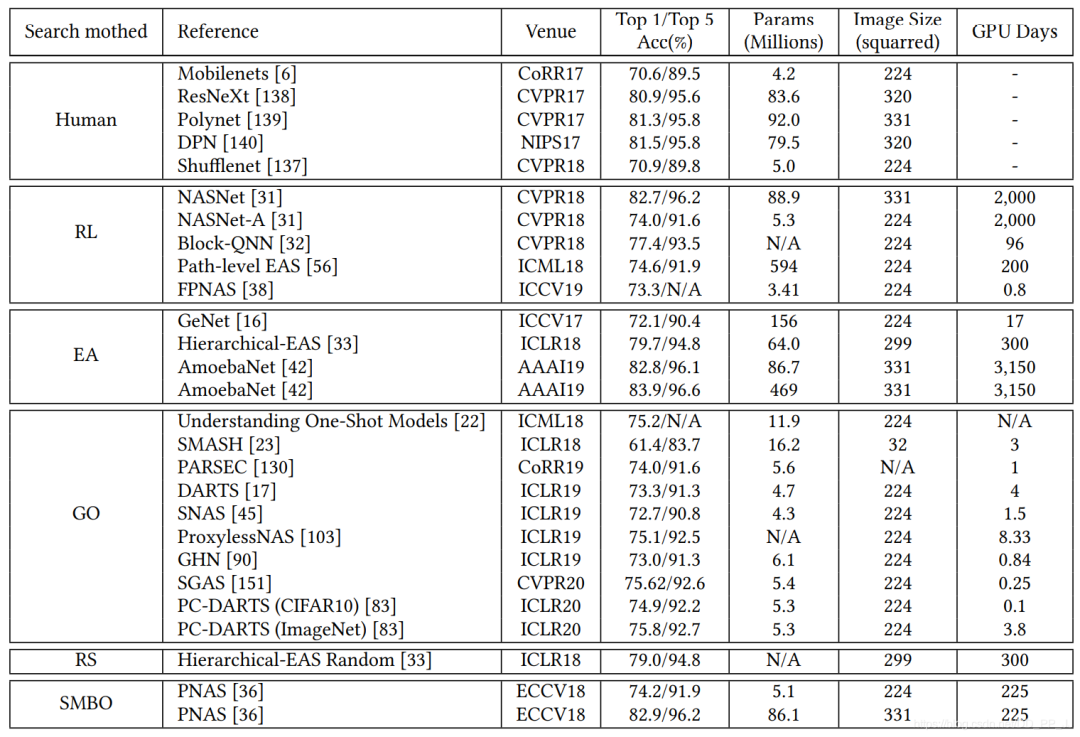
5. 性能对比
-
reinforcement learning(RL) -
evolutionary algorithm(EA) -
gradient optimization(GO) -
random search(RS) -
sequential model-based optimization(SMBO)
-
缺少baseline(通常随机搜索策略会被认为是一个强有力的baseline) -
预处理、超参数、搜索空间、trick等不尽相同
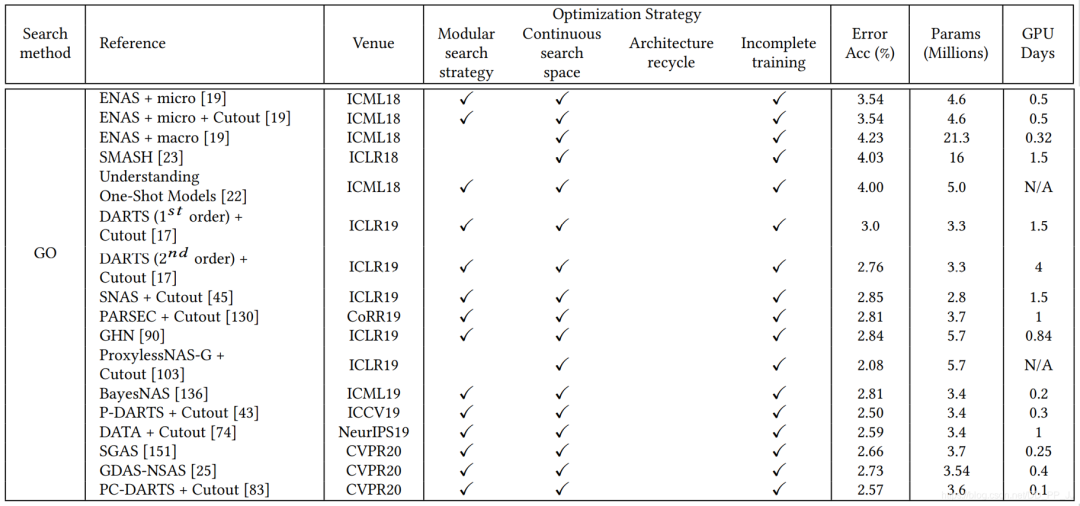
-
模块化搜索策略应用非常广泛,因为可以减低搜索空间的复杂度, 但是并没有证据表明模块化搜索就一定要比全局搜索最终性能要好。 -
不完全训练策略也是用很多,让候选网络rank的过程变得非常有效率。 -
基于梯度的优化方法(如DARTS)与其他策略相比,可以减少搜索的代价,有很多工作都是基于DARTS进行研究的。 -
随机搜索策略也达成了非常有竞争力的表现,但是相对而言这方面工作比较少。 -
迁移学习的技术在这里应用比较广泛,先在小数据集进行搜索(被称为代理任务),然后在大的数据集上迁移。 -
ProxyLessNas也研究了如何直接在大型数据集上直接进行搜索的方法。
6. 未来的方向
7. 结语
8. 参考文献
推荐阅读




登录查看更多
相关内容
Arxiv
6+阅读 · 2019年5月14日


相关VIP内容
相关资讯
相关论文
Arxiv
6+阅读 · 2019年5月14日