【泡泡一分钟】Matterport3D: 从室内RGBD数据集中训练 (3dv-22)
每天一分钟,带你读遍机器人顶级会议文章
标题:Matterport3D: Learning from RGB-D Data in Indoor Environments
作者:
Angel Chang, Angela Dai,Thomas Funkhouser,Maciej Halber,Matthias Nießner, Manolis Savva, Shuran Song, Andy Zeng and Yinda Zhang
来源:3dv 2017 ( International Conference on 3D Vision)
播音员:水蘸墨
编译:陈诚 周平
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

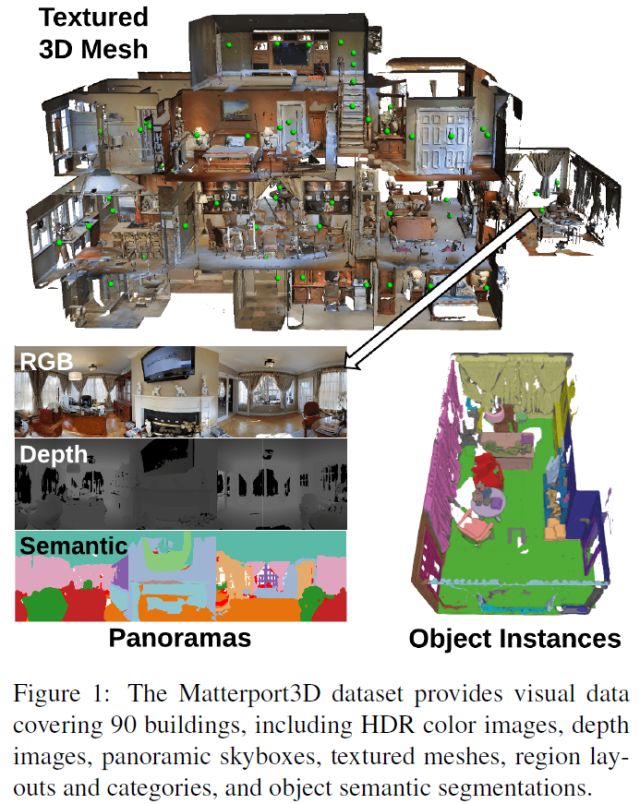
能否访问到大量而且具有差异性RGBD数据集对RGBD场景理解算法至关重要。但是,现有的数据集仅仅包括一些有限的视角或者尺度有限空间。这篇文章里,我们介绍Matterport3D,一个大尺度RGBD的数据集。它包括了90个建筑单位级别的194400个RGBD图像以及10800个全景视角。在重构模型的基础上,这个数据集还提供了相机姿态,以及二维和三维语义分割的标注。每个建筑单元都有精准的全局配准和不同的全局视角,这样使得很多监督或者自我监督的视觉任务变的可行。
同时笔者在这先贴上一些摘自论文里的效果图在这里供读者参考
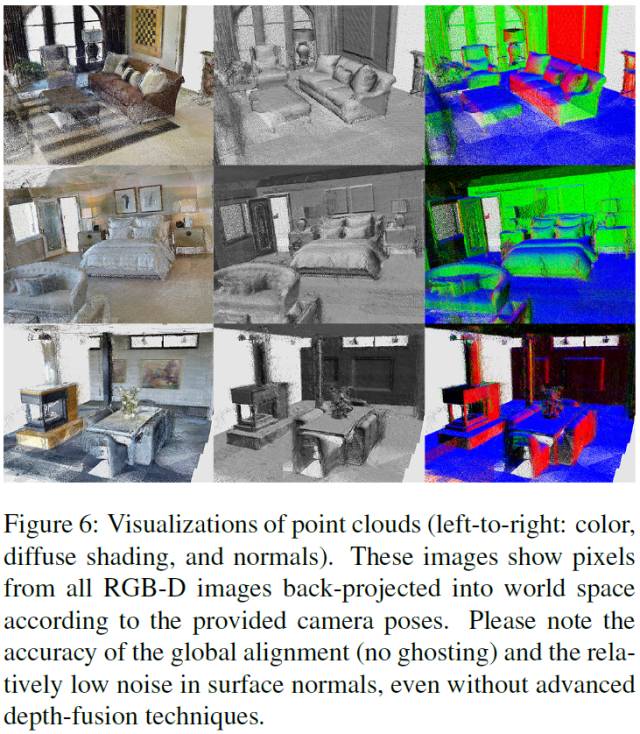
PS:本文虽然主要介绍的是数据集,但很多篇幅也给出了很多有趣的RGBD技术相关的关键算法比较结果,比如说特征点匹配,SLAM里面的回环检测,表面法向量估计,区域类型分类等等,这些都在本文里有了简短的比较分析。
Abstract
Access to large, diverse RGB-D datasets is critical for training RGB-D scene understanding algorithms. However, existing datasets still cover only a limited number of views or a restricted scale of spaces. In this paper, we introduce Matterport3D, a large-scale RGB-D dataset containing 10,800 panoramic views from 194,400 RGB-D images of 90 building-scale scenes. Annotations are provided with surface reconstructions, camera poses, and 2D and 3D semantic segmentations. The precise global alignment and comprehensive, diverse panoramic set of views over entire buildings enable a variety of supervised and self-supervised computer vision tasks, including keypoint matching, view overlap prediction, normal prediction from color, semantic segmentation, and region classification.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
在【泡泡机器人SLAM】公众号(paopaorobot_slam)中回复关键字“3dv-22”,即可获取本文下载链接。


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




