【泡泡一分钟】基于稀疏控制点的多标记点云标注(3dv-40)
每天一分钟,带你读遍机器人顶级会议文章
标题:Multi-Label Point Cloud Annotation by Selection of Sparse Control Points
作者:Riccardo Monica, Jacopo Aleotti, Michael Zillich, Markus Vincze
来源:3dv 2017 ( International Conference on 3D Vision)
播音员:丸子
编译:颜青松
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文展示了一种容易使用的多标记点云标注方法,即使用鼠标交互选择一系列稀疏控制点完成某目标的点云标注(这也意味着多个控制点可以使用相同标注)。该方法以选中的控制点为基准,使用基于最短路径树的邻域图上的分割算法。同时为方便用户改正分割错误, 该方法还实时反馈分割效果。与之前的方法相比,本文中的方法支持对散乱点云进行多标记标注。
本文中的方法已经被大量用户使用,并且和常规的矩形框选标注方法进行了比较。实验结果证明本文的方法更易使用,并且针对具有遮挡的复杂场景也能更快的进行分割和标注。
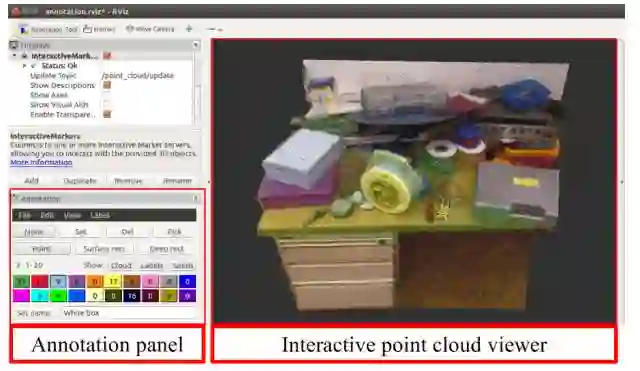
下图展示了点云标注软件的界面。
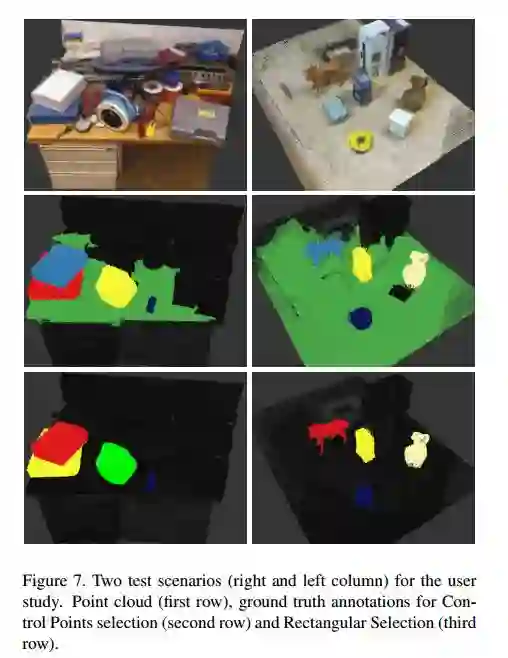
下图是在两个数据集上,比较使用本文算法和框选算法的标注结果差异。第一行是使用的点云数据,第二行是本文算法的结果,第三行是框选式结果。
Abstract
This paper presents a user-friendly approach for multilabel point cloud annotation. The method requires the user to select sparse control points belonging to the objects through a mouse-based interface. Multiple control points may be assigned to the same label. The software utilizes the selected control points to perform a segmentation algorithm on the neighborhood graph, based on shortest path tree. The user is provided a real-time feedback about the result, and can correct segmentation errors. In contrast to previous work the method supports multi-label annotation of unorganized point clouds.
The method has been evaluated by multiple users and compared with a standard rectangle-based selection technique. Results indicate that the proposed method is perceived as easier to use, and that it allows a faster segmentation even in complex scenarios with occlusions
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
在【泡泡机器人SLAM】公众号(paopaorobot_slam)中回复关键字“3dv-40”,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




