【泡泡一分钟】多地面和空中车辆的协同目标运输:建模与规划
每天一分钟,带你读遍机器人顶级会议文章
标题:Driven to Distraction: Self-Supervised Distractor Learning for Robust Monocular Visual Odometry in Urban Environments
作者:Dan Barnes, Will Maddern, Geoffrey Pascoe and Ingmar Posner
来源:2018 IEEE International Conference on Robotics and Automation (ICRA) May 21-25, 2018, Brisbane, Australia
编译:张宁
审核:陈世浪 颜青松
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

在本文中,考虑了由运输任务中涉及的多个地面和空中机器人组成的系统的建模和规划问题。地面机器人严格地抓住负载,而飞行器通过非刚性不可伸展的电缆连接到物体上。这种异构多机器人系统背后的想法是受益于两种类型的机器人的优点,这些机器人可能是地面机器人的精确度和多个飞行器的高负荷。通过设置一般约束最优规划问题,导出系统的整体模型,并利用其表达和冗余。该问题在此通过动态编程解决,并且仿真结果验证了所提出的方案。
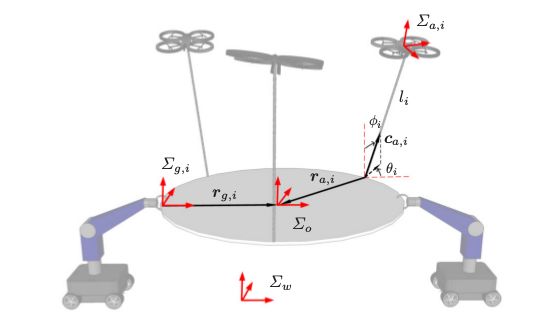
图1 由地面和空中交通工具组成的所考虑的多机器人系统的表示
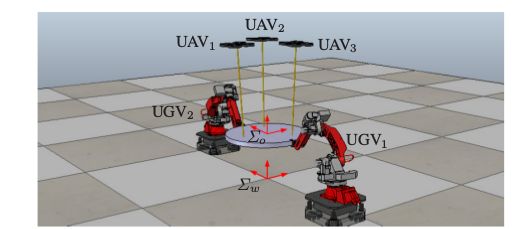
图2 仿真设置
本文旨在为由无人机和UGV组成的异构团队合作运输负载奠定基础。无人机通过不可伸展的电缆连接到负载上,并可以自由地浮在物体上的电缆连接点周围。这种冗余与系统模型一起被利用来设置考虑若干目标的最优规划问题,如无人机和UGV之间的负载分布以及可由无人机生成的可行扳手的空间。

Abstract
In this paper, the modeling and planning problems of a system composed of multiple ground and aerial robots involved in a transportation task are considered. The ground robots rigidly grasp a load, while the aerial vehicles are attached to the object through non-rigid inextensible cables. The idea behind such a heterogeneous multi-robot system is to benefit of the advantages of both types of robots that might be the precision of ground robots and the high pay-load of multiple aerial vehicles. The overall model of the system is derived and its expression and redundancy are exploited by setting a general constrained optimal planning problem. The problem is herein solved by dynamic programming and simulation results validated the proposed scheme.
如果你对本文感兴趣,请点击点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘提取码:n94y
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





