
题目: Coordination of Autonomous Vehicles: Taxonomy and Survey
摘要:
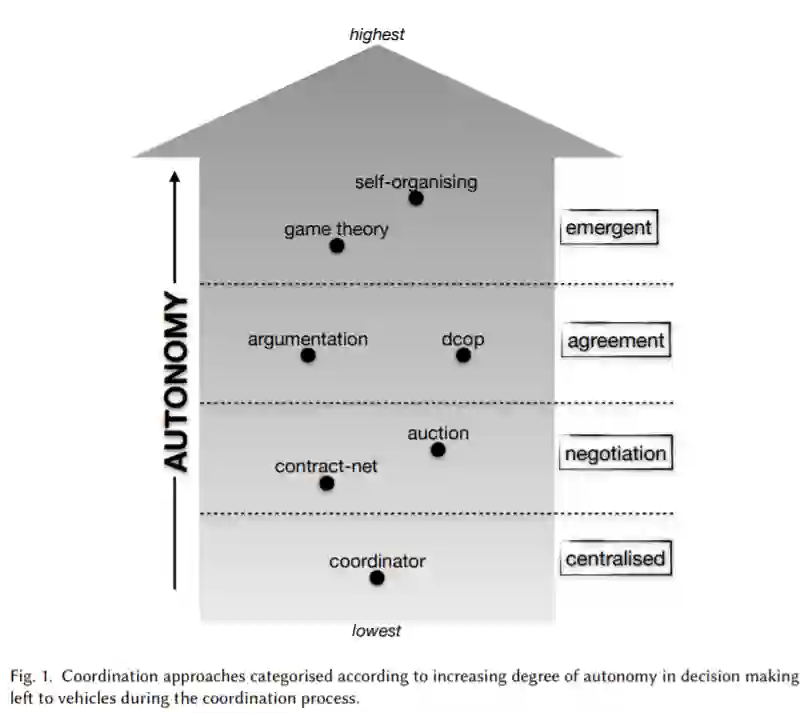
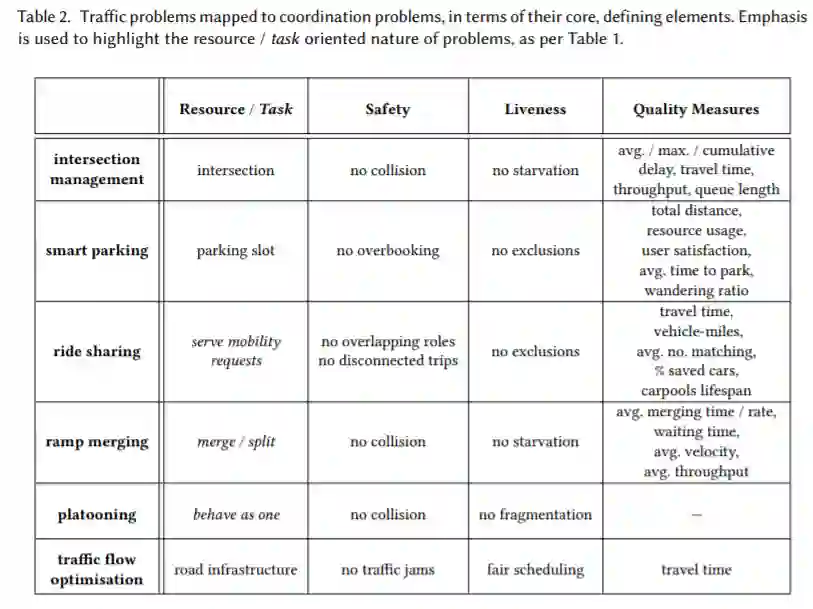
在不久的将来,我们的街道上将会有无数的自动驾驶汽车,以满足我们多样化的移动需求。这就需要协调他们的行动,以便正确处理对共享资源的访问(例如,十字路口和停车位)和移动任务的执行(例如,排队和坡道合并)。在这篇论文中,我们首先介绍了与自动驾驶车辆协调相关的一般问题,通过识别和构建协调问题的关键类别。接下来,我们概述了可以用来管理这些协调问题的不同方法,方法是根据协调过程中留给自动驾驶车辆的决策自主权对它们进行分类。最后,我们概述了一些特殊的挑战,在自动协调的车辆能够安全到达我们的街道之前,研究必须解决这些挑战。
作者简介:
Stefano Mariani,摩德纳雷焦艾米利亚大学工程科学系的固定期限研究助理(博士后)。研究兴趣:基于元组的协调模型和语言、社会技术系统、自我组织机制、多智能体系统、逻辑编程、Agent-oriented技术、普适系统&物联网。个人主页:http://apice.unibo.it/xwiki/bin/view/StefanoMariani/WebHome
成为VIP会员查看完整内容

相关内容

专知会员服务
34+阅读 · 2019年12月25日
专知会员服务
52+阅读 · 2019年12月16日
Arxiv
12+阅读 · 2020年6月10日
Arxiv
3+阅读 · 2018年12月13日
相关主题


相关VIP内容
专知会员服务
34+阅读 · 2019年12月25日
专知会员服务
52+阅读 · 2019年12月16日
相关资讯
相关论文
Arxiv
12+阅读 · 2020年6月10日
Arxiv
3+阅读 · 2018年12月13日