【泡泡一分钟】Rapyuta:RoboEarth云引擎(ICRA-31)
每天一分钟,带你读遍机器人顶级会议文章
标题:Rapyuta: The Robo Earth Cloud Engine
作者:Dominique Hunziker, Mohanarajah Gajamohan, Markus Waibel, and Raffaello D' Andrea
来源:2013 IEEE International Conference on Robotics and Automation (ICRA)
播音员:清蒸鱼
编译: 杨小育
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

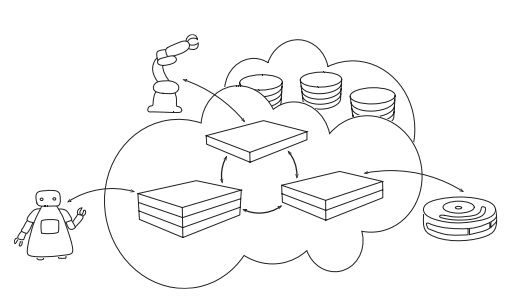
图 1 Rapyuta框架的简要概述:连接到Rapyuta的每个机器人都有一个安全的计算环境(矩形框),使他们能够将沉重的计算转移到云中。 计算环境彼此紧密互连,并与Robo Earth知识库(堆叠式圆盘)具有高带宽连接
通过在云中提供安全的可定制计算环境,帮助机器人减轻繁重的计算负担。计算环境还允许机器人轻松访问RoboEarth知识库。并且,这些计算环境紧密相连,为机器人团队的研发任务铺平了道路。
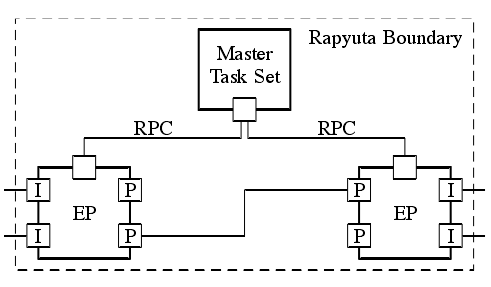
图2 Rapyuta的基本通信通道:端点(EP)使用远程过程调用(RPC)协议连接到主站。 另外,端点具有用于连接到机器人或计算环境的接口(I)以及用于端点之间通信的端口(P)
最后,文章还描述了特定情况下的配置和性能结果
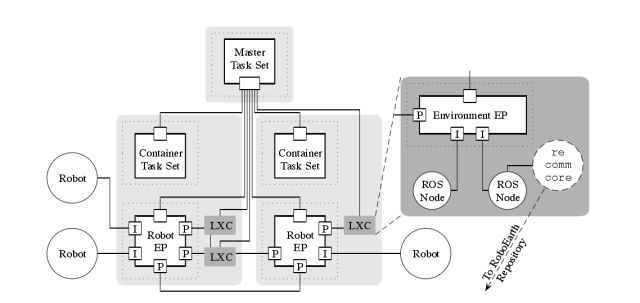
图3 情形1:部署在三台服务器(浅灰色块)上的Rapyuta进程的典型用例,用于构建具有互连计算环境(LXC,深灰色块)的Paa S框架。在这里,主任务集作为一个服务器上的单个进程运行,其他两个服务器用于部署容器。在托管容器的每台服务器内部,机器人任务集作为单个进程运行,并且在每个容器内部,环境任务集作为单个进程运行。由LXC (Linux容器)表示的计算环境在图的右侧放大。通信核心节点中的虚线箭头表示与同一集群/数据中心内的Robo Earth知识库的连接,因此提供了高带宽访问。
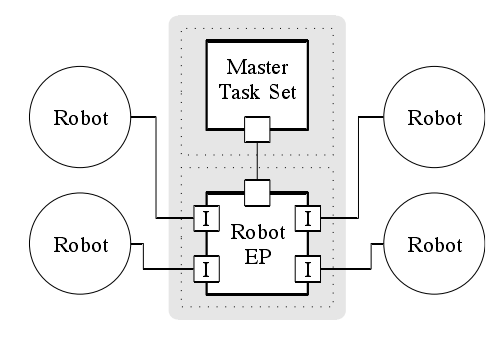
图4 情形2:过程配置,用于在单个服务器(浅灰色块)中设置运行Robot EP和Master过程的机器人网络。
Abstract
In this paper we present the design and implementation of Rapyuta1, the RoboEarth Cloud Engine. Rapyuta is an open source Platform-as-a-Service (PaaS) framework designed specifically for robotics applications. Rapyuta helps robots to offload heavy computation by providing secured customizable computing environments in the cloud. The computing environ-ments also allow robots to easily access the RoboEarth knowledge repository. Furthermore, these computing environments are tightly interconnected, paving the way for deployment of robotic teams. We also describe specific use case configurations and present some performance results.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





