【泡泡一分钟】自主车辆驾驶区的自监督学习
每天一分钟,带你读遍机器人顶级会议文章
标题:Self-Supervised Learning of the Drivable Area for Autonomous Vehicles
作者:Jakob Mayr, Christian Unger and Federico Tombari
来源:2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
编译:张建
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

我们提出了一种基于深度神经网络(DNN)的针对可驾驶区域分割任务的训练数据生成方法。
近年来,深度学习取得了令人瞩目的进展,这表明,与传统的机器学习和各种任务的确定性算法相比,DNN具有优越的性能。然而,带有相关地面真值标注的大型数据集的采集仍然是一个昂贵的且劳动密集型的问题。
为了解决道路分割问题,我们提出了一种自动标注流程,利用确定性立体的地面检测方法,创建适合神经网络训练的大型数据集。
基于目前流行的城市景观和KITTI数据集,以及两个现成的语义分割DNN,我们发现我们可以在单目图像上获得良好的分割效果,这大大超过了无需任何人工注释的自动标注算法的性能。
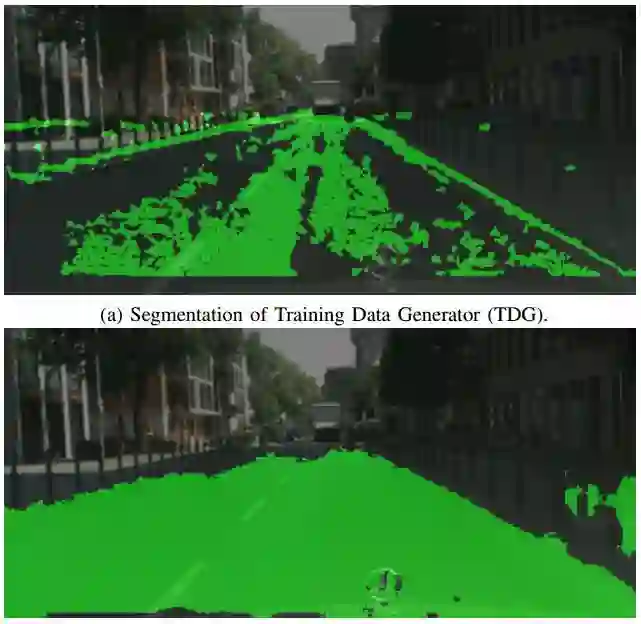
图1:分割示例:(a)训练数据生成器和(b)对自动标注数据进行训练的DNN。
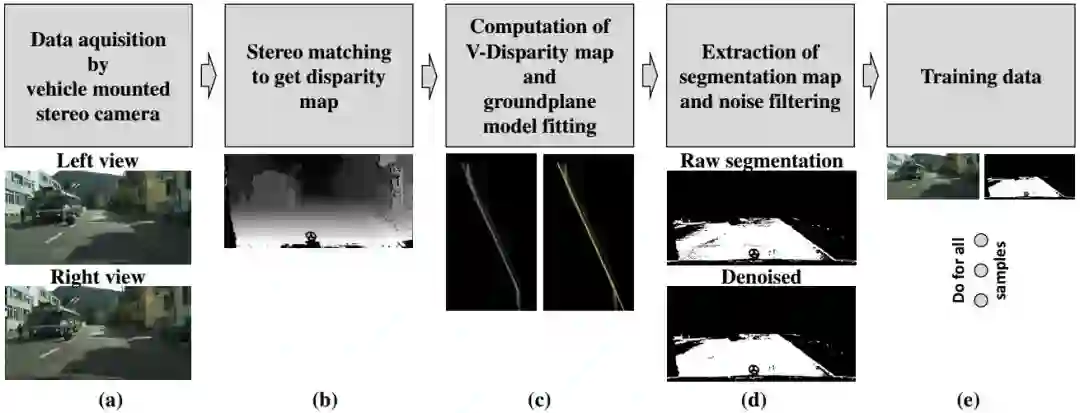
图2:系统概述与我们提出的训练数据生成器(TDG)的示例输出,用于可驾驶区域的自动注释。

Abstract
We propose a new approach for generating training data for the task of drivable area segmentation with deep neural networks (DNN). The impressive progress of deep learning in recent years demonstrated a superior performance of DNNs over traditional machine learning and deterministic algorithms for various tasks. Nevertheless, the acquisition of large-scale datasets with associated ground truth labels still poses an expensive and labor-intensive problem. We contribute to the solution of this problem for the task of road segmentation by proposing an automatic labeling pipeline which leverages a deterministic stereo-based approach for ground plane detection to create large datasets suitable for training neural networks. Based on the popular Cityscapes and KITTI dataset and two off-the-shelf DNNs for semantic segmentation, we show that we can achieve good segmentation results on monocular images, which substantially exceed the performance of the algorithm employed for automatic labeling without the need of any manual annotation.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



