【泡泡一分钟】用深度学习改善现有的立体匹配算法(CVPR-23)
每天一分钟,带你读遍机器人顶级会议文章
标题:Improved Stereo Matching With Constant Highway Networks and Reflective Confidence Learning
作者:Shaked, Amit, and L. Wolf.
来源:CVPR 2017
播音员:清蒸鱼
编译:鲁涛
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天给大家带来的文章介绍了如何基于深度学习设计改善的立体匹配算法——“Improved Stereo Matching With Constant Highway Networks and Reflective Confidence Learning”,该文章选自CVPR2017。
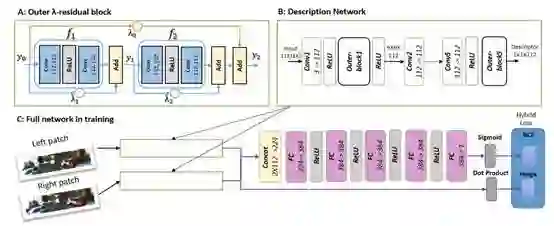
图1 网络框架
本文提出了一种新的highway network架构,它基于多级加权残差的跳层连接(multilevel weighted residual shortcuts)的方式,计算每个可能视差值的匹配误差,并利用复合损失函数进行训练,支持图像块的多级比较。
然后引入了一个新的后期处理步骤,该步骤用第二个CNN网络汇集了(pooling)从多个视差值中获取的全局信息。这个网络的输出包括图像的视差图以及预测结果的置信度,前者没有采用过去的“赢家通吃(winner-takes-all)”策略,后者是作者在训练网络时用一种新技术来实现的,该技术可称之为“反射损失”,这个置信度在精细化步骤中可用于更好地检测异常点。
下图为从KITTI2015中选取一张示例图片。可以看到前挡风玻璃处的明显变化。

图2 从KITTI2015中选取一张示例图片。可以看到前挡风玻璃处的明显变化。
本文的方法在最大、最有挑战的立体匹配基准数据集上取得了当下最好的结果,而且置信度超过了所有的现有算法。
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
回复关键字“stereo matching”,即可获取本文下载链接。

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




