【泡泡一分钟】基于隐式二次曲面交点的视觉特征点云配准(3dv-19)
每天一分钟,带你读遍机器人顶级会议文章
标题:Point Cloud Registration with Virtual Interest Points from Implicit Quadric Surface Intersections
作者:Mirza Tahir Ahmed, Joshua A. Marshall, and Michael Greenspan
来源:3dv 2017 (International Conference on 3D Vision )
播音员:朱英
编译:袁梦
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

今天介绍的文章是“Point Cloud Registration with Virtual Interest Points from Implicit Quadric Surface Intersections”——基于隐式二次曲面交点的视觉特征点云配准,该文章发表在 3dv-2017。
本文提出了一种稳健而有效的重叠点云配准的新方法。点云分割之后,用三个变量的二次多项式表示区域为隐二次曲面。点云配准建立了原始点云数据中不存在的虚拟特征点之间的对应关系,该特征点云为提取的点云区域的三个隐二次曲面的交点。
隐式二次曲面在自然场景和建筑场景中大量存在,可以用来识别数据中的稳定区域,从而产生可重复的虚拟特征点。可以用几个隐式曲面来表示点云中的大区域,这不仅降低了配准的计算成本,也使得算法对噪声和数据密度变化具有鲁棒性。
通过七个由不同传感器采集的数据集进行实验,结果表明,该方法的计算效率和收敛性要优于大多数的基于特征的配准和非特征配准方法。
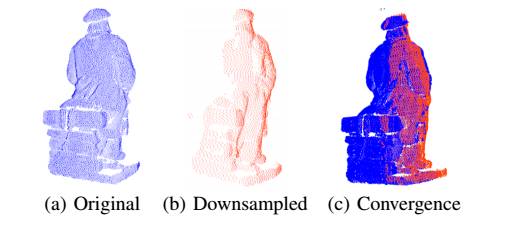
对数据密度变化的鲁棒性。(a)原始大小(b)46%对第二点云的原始大小(c)配准使用VIP,收敛到全局最小值。
Abstract
A novel method is presented to robustly and efficiently register two partially overlapping point clouds. Following segmentation, the regions are represented as implicit quadric surfaces using polynomials of degree two in three variables. The registration establishes correspondences of virtual interest points, which do not exist in the original point cloud data, and are defined by the intersection of three implicit quadric surfaces extracted from the point cloud regions. Implicit quadric surfaces exist in abundance in both natural and architectural scenes, and can be used to identify stable regions in the data, which in turn leads to repeatable virtual interest points. Large regions in a point cloud can be represented by a few implicit surfaces, which reduces the computational cost of registration and also makes the algorithm robust to noise and data density variations. Experiments were performed on seven data sets from various sensors. The proposed method outperformed most of the feature based registration and non-feature based registration methods for computational efficiency and convergence.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
在【泡泡机器人SLAM】公众号(paopaorobot_slam)中回复关键字“3dv-19”,即可获取本文下载链接。


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



