ICRA2019 | ScalableFusion: 基于Mesh的高分辨率实时三维重建
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
标题:ScalableFusion: High-resolution Mesh-based Real-time 3D Reconstruction
作者:Simon Schreiberhuber, Johann Prankl, Timothy Patten and Markus Vincze
来源:2019 International Conference on Robotics and Automation (ICRA) Palais des congres de Montreal, Montreal, Canada, May 20-24, 2019
编译:杨雨生
审核:黄思宇,孙钦

摘要

稠密三维重建可以生成,能够用于许多机器人应用环境的全局一致性数据。然而,当前的基于RGB-D图像的三维重建,只能保持颜色分辨率与所使用的深度相机的分辨率相匹配。这一点牢牢限制住了重建模型的精度和还原度。在本文中,作者提出了一种实时三维重建算法,能够以尽可能高的几何保真度来进行表面重建和保持,并且能够以传感器的完整分辨率来进行着色(或添加表面纹理)。作者提出的一种多尺度内存管理方法和“细节级别”的解决方案,不仅能够对小尺度的物体进行详细的建模,对于大尺度的对象,比如房间或者建筑物,也能够进行详细的建模。作者利用一个PrimeSense RGB-D 相机,同时将这个相机的深度通道与一个高分辨率的全局快门相机相结合,验证了所提出方法的优越性。进一步的实验表明,作者所提出的内存管理方法能够处理当前最新技术处理不了的大规模场景。
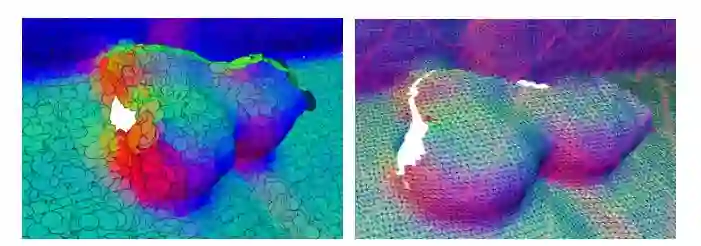
图1:上图是对三个苹果进行重建的结果,其中左图是 ElasticFusion, 面元是根据表面法向量进行着色。右图是 ScaleableFusion, 直接基于Mesh的重建。

图2:“细节级别“解决方案示例。其中右侧是显示了细节,左侧部分则是以较低的分辨率显示的。红色圈出的部分是图1的苹果。
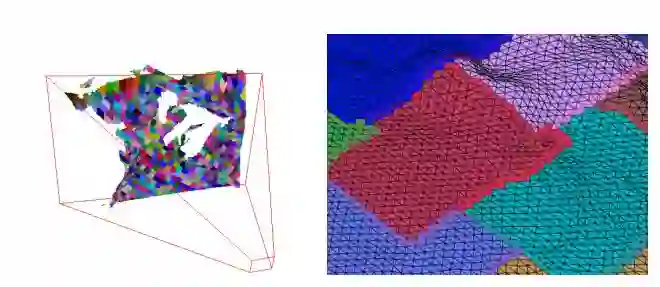
图3:左图,将点云数据粗分割为小块的patch。右图,对patch进行三角化。
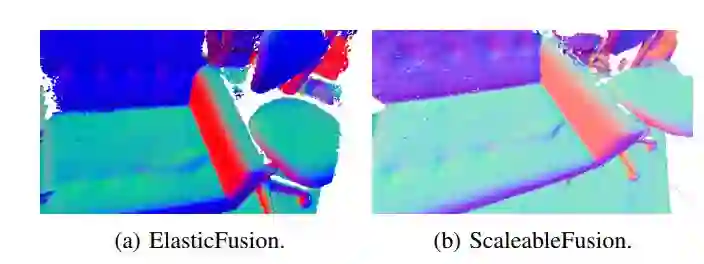
图4:上图显示的是法向量信息。尽管上述两种方法显示了相似的结果,作者的方法显示了更多的细节。
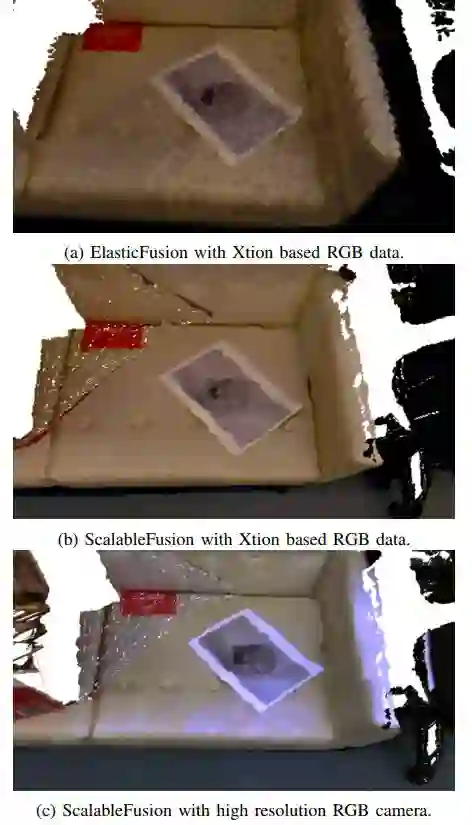
图5:大部分现有的方法对于颜色信息进行了平均处理,如(a)所示;作者的方法(b, c)则保留了更多的细节,如果采用了更高分辨率的图像的话,效果会更好(c)。
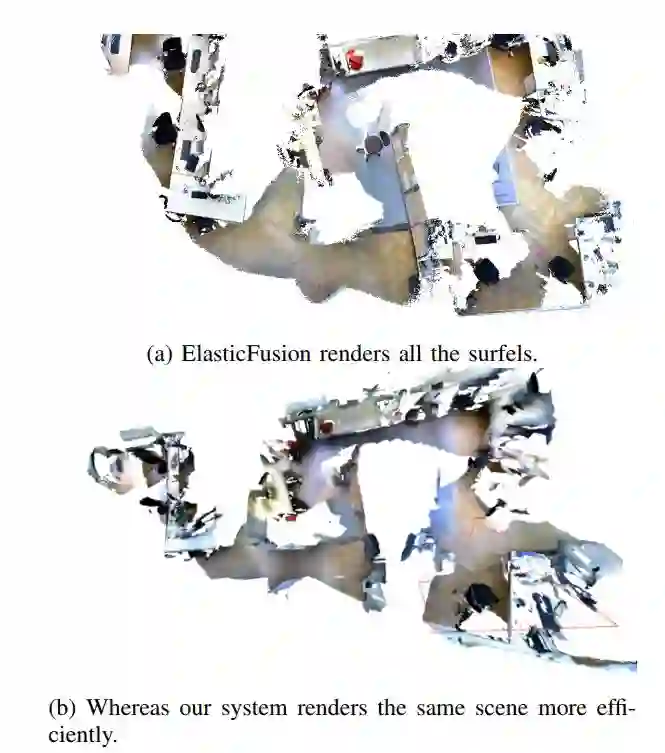
图6:上图是对一个大型办公室进行重建的部分结果。

Abstract
Dense 3D reconstructions generate globally consistent data of the environment suitable for many robot applications. Current RGB-D based reconstructions, however, only maintain the color resolution equal to the depth resolution of the used sensor. This firmly limits the precision and realism of the generated reconstructions. In this paper we present a real-time approach for creating and maintaining a surface reconstruction in as high as possible geometrical fidelity with full sensor resolution for its colorization (or surface texture). A multi-scale memory management process and a Level of Detail scheme enable equally detailed reconstructions to be generated at small scales, such as objects, as well as large scales, such as rooms or buildings. We showcase the benefit of this novel pipeline with a PrimeSense RGB-D camera as well as combining the depth channel of this camera with a high resolution global shutter camera. Further experiments show that our memory management approach allows us to scale up to larger domains that are not achievable with current state-of-the-art methods.
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、检测分割识别、三维视觉、医学影像、GAN、自动驾驶、计算摄影、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~

投稿、合作也欢迎联系:simiter@126.com

长按关注计算机视觉life
推荐阅读
从零开始一起学习SLAM | 不推公式,如何真正理解对极约束?
从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码
从零开始一起学习SLAM | 用四元数插值来对齐IMU和图像帧
最新AI干货,我在看





