【泡泡图灵智库】一种实时的基于3D LiDAR的连续时间SLAM方法(ICRA)
泡泡图灵智库,带你精读机器人顶级会议文章
标题:Efficient Continuous-time SLAM for 3D Lidar-based Online Mapping
作者:David Droeschel and Sven Behnke
来源:ICRA 2018
编译:杨健博
审核:尹双双
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——实时的基于3D LiDAR的SLAM方法,该文章发表于ICRA2018。
现代3D激光扫描仪有很高的数据获取频率,对实时SLAM带来了极大的计算量方面的挑战。递推状态估计的方法效率很高,但是依赖于对每一帧的状态估计,这样有可能会造成测量值之间的不匹配。文章提出了一种3D SLAM的方法实时的对这些不匹配做出校准。这种方法基于高效的local mapping和一个后台的层级优化(hierarchical optimization)。3D激光扫描仪的测量值用基于surfel模型的匹配进行多帧点云local地图融合。构建local地图之后用一个多级图整体的定位和构图。为了合并改正值消除误差,将local地图中的扫描仪位置作为子图,以此来进行图优化修正漂移和匹配误差。在子图中,基于传感器的连续时间轨迹表示可以用来校正激光扫描仪的位姿。文章通过定性的结果用多次实验评价提出的方法。
主要贡献
1.本文提出了一种利用层级优化来调整优化进行实时3D激光SLAM的方法
算法流程
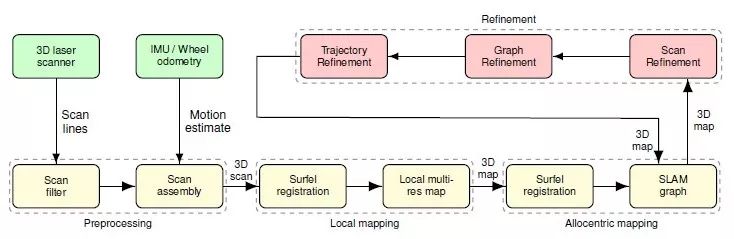
图1 系统流程图。激光测量值首先进行预处理并组合成点云。点云用来估计当前帧和已有地图的变换关系。配准好的点云帧记录在多分辨率的local地图中。不同视角的local地图通过图来进行配准连接。在构图过程中,图的部分会被用来修正,不同帧之间的错误匹配也会被纠正。
系统通过一个多分辨率的网格地图来记录观测值,距离激光扫描仪近的地方分辨率高,网格尺寸小,远的地方分辨率低。在每个网格中记录了该网格被占据的概率和surfel元素的相关信息。
系统通过IMU或者轮速计来模拟运动模型,除此之外这些运动估计值也可作为地图先验。
系统通过基于surfel的配准方法将新一帧的点云加入到local地图之中。通过这种方法可以快速有效的将连续的若干帧点云进行融合构建local地图。
不同视角的local地图通过基于surfel配准在一起然后建立一个位姿图。连接两个local地图的配准结果作为边。每次有新的local地图加入都会新增一条边。这个位姿图也可用来进行回环检测并最小化构图过程中的累积误差。
Local地图通过文章提出的纠正方法进行修正,当信息较多的时候进行再次评定。
层次修正HIERARCHICAL REFINEMENT
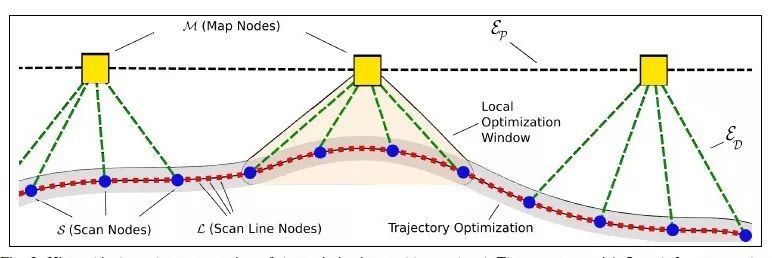
图2 针对优化问题的层次图:顶点集合M,S和L和估计变量相关,M是local地图的位姿,S是激光扫描仪,L是扫描线。边的集合EP和ED代表配准的约束:EP是两个local地图的匹配,ED是激光扫描仪和sufel模型的匹配。从S与S之间的轨迹利用连续时间轨迹表示用三次B样条曲线进行估计,内插出每个3D扫描仪的位置L
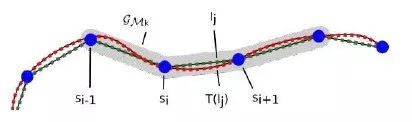
图3 通过用扫描仪位姿(蓝点)和local的子图(灰色)建立的连续时间轨迹表示进行内插,来源于里程计测量值的扫描线的位姿(绿色方块)被修正(红色方块)
回环检测
在local地图被加入位姿图之后,会加入一个当前的结点mref与其他图的结点mcmp的约束

d(mref,mcmp)为和mcmp之间的线性距离,根据pchk(m)来选择结点之间是否有约束。
主要结果
通过计算平均地图熵mean map entropy (MME) 来评价地图质量,某点qk的熵h为:

平均地图熵定义为:
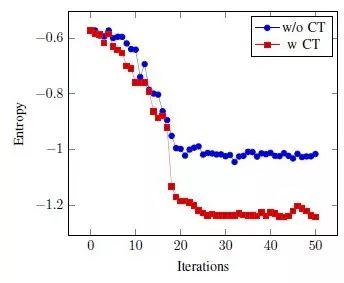
图4.在庭院采集的一组数据,使用连续时间轨迹表示和不使用的结果比较。
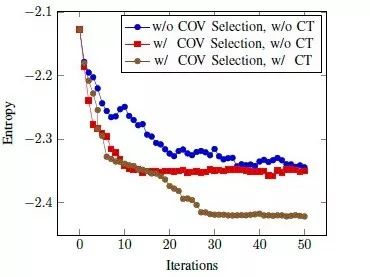
图5.在博物馆采集的一组数据,根据是否使用基于协方差的选择方案(COV)或连续时间轨迹表示内插(CT)的结果比较。

Abstract
Modern 3D laser-range scanners have a high data rate, making online simultaneous localization and mapping (SLAM) computationally challenging. Recursive state estimation techniques are efficient but commit to a state estimate immediately after a new scan is made, which may lead to misalignments of measurements. We present a 3D SLAM approach that allows for refining alignments during online mapping. Our method is based on efficient local mapping and a hierarchical optimization back-end. Measurements of a 3D laser scanner are aggregated in local multiresolution maps by means of surfel-based registration. The local maps are used in a multi-level graph for allocentric mapping and localization. In,order to incorporate corrections when refining the alignment, the individual 3D scans in the local map are modeled as a sub-graph and graph optimization is performed to account for drift and misalignments in the local maps. Furthermore, in each sub-graph, a continuous-time representation of the sensor trajectory allows to correct measurements between scan poses. We evaluate our approach in multiple experiments by showing qualitative results. Furthermore, we quantify the map quality by an entropy-based measure.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




