港科大最新开源 | 具有在线外部校准的多激光雷达系统
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
本文转自当SLAM遇见小王同学
/ 导读 /
标题:Robust Odometry and Mapping for Multi-LiDAR Systems with Online Extrinsic Calibration
作者:Jianhao Jiao、Haoyang Ye、Yilong Zhu、Ming Liu,
编译: 王子龙
论文地址:
https://arxiv.org/abs/2010.14294
代码:
https://ram-lab.com/file/site/m-loam

摘要
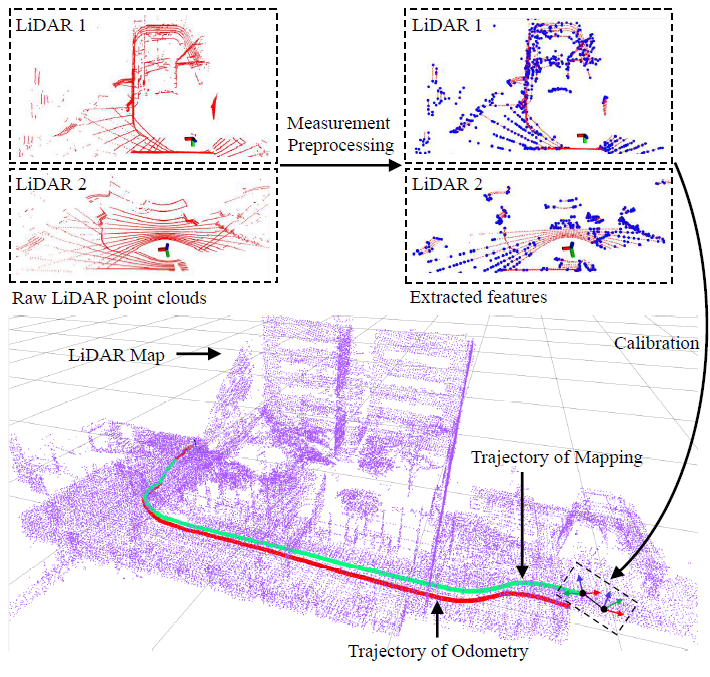
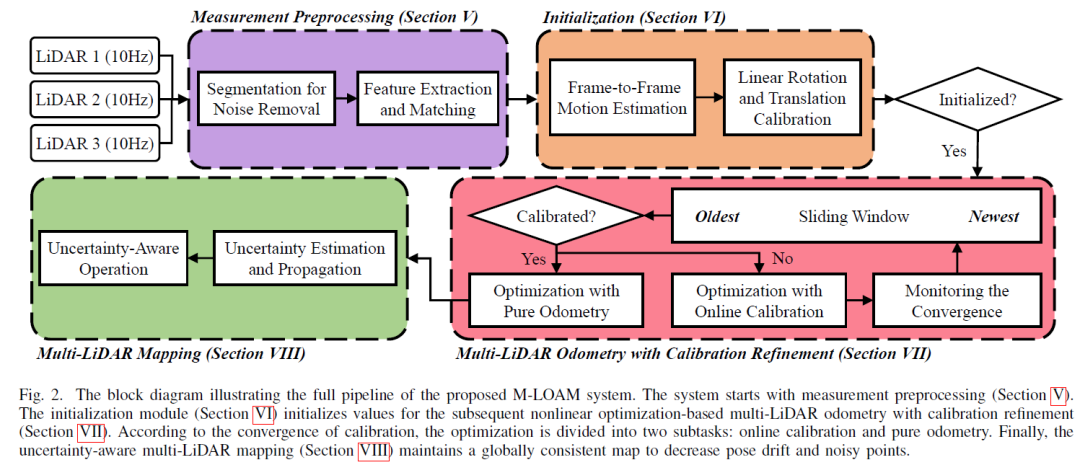
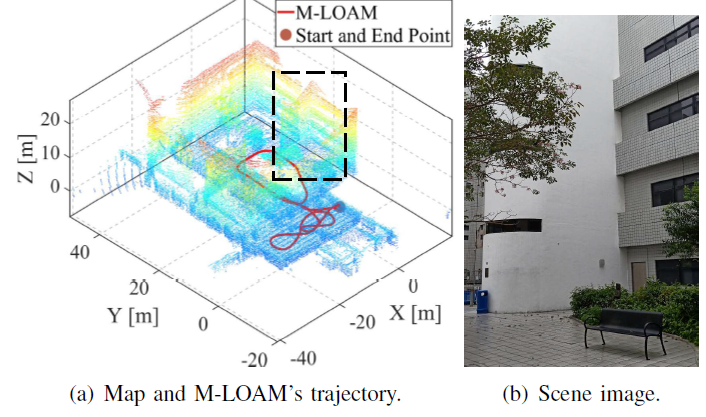
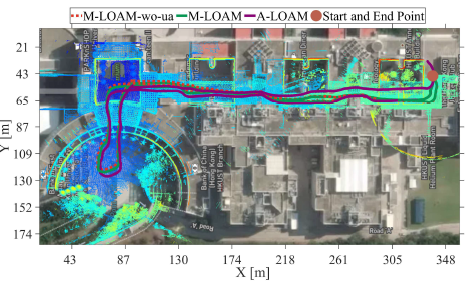
本文提出了一种系统来实现多激光雷达的同时外部校准、里程计和建图.我们的方法从测量预处理开始,从原始测量中提取边缘和平面特征.经过运动和外部初始化过程后,基于滑动窗口的多激光雷达里程计runs onboard,通过在线校准细化等来估计姿态.我们进一步开发了一种建图算法来构建全局地图,并优化具有足够特征的位姿,以及一种建模和减少数据不确定性的方法.我们通过对十个序列(总长度为4.60公里)的校准和SLAM的广泛实验来验证我们的方法的性能,并将它们与最新技术进行比较,我们证明了所提出的工作对于各种多激光雷达设置来说是一个完整、鲁棒和可扩展的系统.

自动初始化.计算所有关键状态,包括连续帧之间的运动以及后续阶段的外部状态.它可以从任意位置开始,而无需任何机械配置或校准对象的先验知识.
具有一般收敛标准的在线自校准与里程计同时执行.它能够以完全无监督的方式监控收敛并触发终止
基于滑动窗口的里程计可以联合利用来自多个激光雷达的信息.这种实现被解释为 small-scale frame-to-map 的配准,这进一步减少了由连续帧到帧的里程计积累漂移.
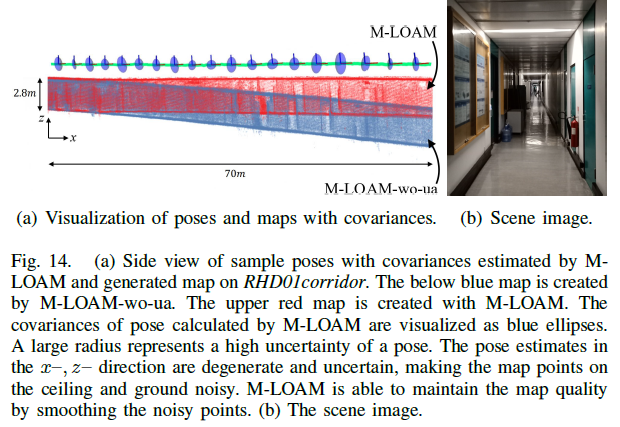
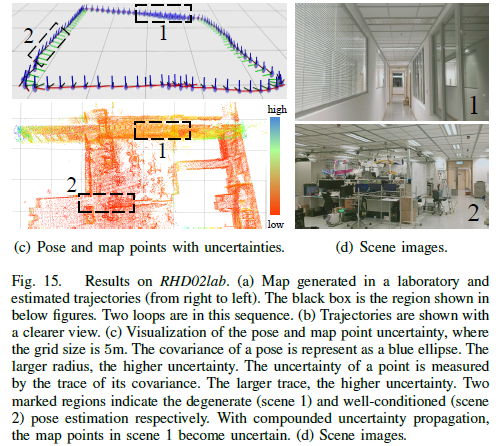
从传感器噪声、退化姿态估计和外部扰动中捕获并 propagates 点的不确定性.这种方法使地图绘制过程具有不确定性,有助于我们保持全球地图的一致性,并增强系统对长期导航任务的鲁棒性.



从0到1学习SLAM,戳↓

交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
投稿、合作也欢迎联系:simiter@126.com

扫描关注视频号,看最新技术落地及开源方案视频秀 ↓




