【泡泡一分钟】静动态物体的三维向量场分析法 (3dv-65)
每天一分钟,带你读遍机器人顶级会议文章
标题:Static and Dynamic Objects Analysis as a 3D Vector Fiel
作者:Cansen Jiang∗ , Yohan Fougerolle, David Fofi, Cedric Demonceaux
来源:3dv 2017 ( International Conference on 3D Vision)
播音员:郭晨
编译:刘梦雅
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

在场景建模,理解和基于地标的机器人导航中,静态场景以及运动物体的运动行为分析至关重要。本文提出了一个检测及提取运动物体的完整框架用于重建高质量的静态地图。对于移动的3D相机设置,本文提出了一种新颖的三维流场分析方法,仅用三维点云信息就可以精确地检测到运动物体。此外,本文还介绍了一种稀疏流场聚类方法,能有效且鲁棒性地分组运动流向量。
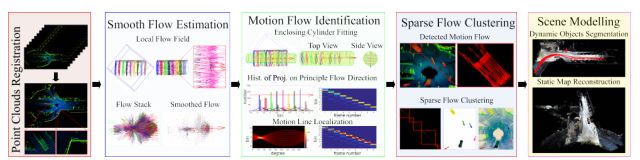
下图介绍了系统的整体框架,第一步,输入3D点云序列,并利用ICP算法进行点云配准及相机帧间运动估计;第二步,对每个点使用框内邻域(局部)流场来计算其平滑流向量(Smooth Field Vector, SFV)以表征其运动行为;第三步,确定一个封闭的圆柱体区域(以SFV为中心)用来限定投影到SFV上的内部邻域并生成一系列一维直方图,直方图的移动与物体的运动有关;第四步,应用稀疏流体聚类算法将检测到的运动流重分组为各自独立的运动;第五步,动态场景部分被识别并移除以成功构建静态场景。
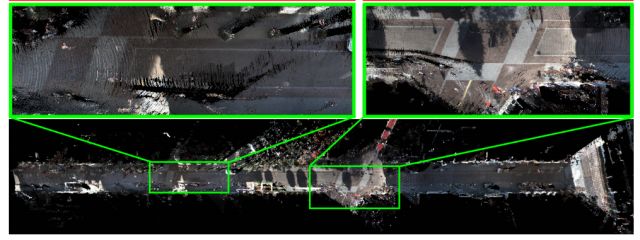
实验结果表明,本文提出的流场分析算法及稀疏流体聚类算法在运动检测及分割上效果显著,并且能产生高质量的重构静态场景以及真实场景中的刚性运动物体,如下图所示,可以看到重建的静态场景具有较高的质量。
Abstract
In the context of scene modelling, understanding, and landmark-based robot navigation, the knowledge of static scene parts and moving objects with their motion behaviours plays a vital role. We present a complete framework to detect and extract the moving objects to reconstruct a high quality static map. For a moving 3D camera setup, we propose a novel 3D Flow Field Analysis approach which accurately detects the moving objects using only 3D point cloud information. Further, we introduce a Sparse Flow Clustering approach to effectively and robustly group the motion flow vectors. Experiments show that the proposed Flow Field Analysis algorithm and Sparse Flow Clustering approach are highly effective for motion detection and segmentation, and yield high quality reconstructed static maps as well as rigidly moving objects of real-world scenarios.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
点击“阅读原文”,即可获取本文下载链接。

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com