【泡泡一分钟】基于大视角立体相机的MAV鲁邦视觉定位和高效建图
每天一分钟,带你读遍机器人顶级会议文章
标题:Robust Visual-Inertial State Estimation with Multiple Odometries andEfficient Mapping on an MAV with Ultra-Wide FOV Stereo Vision
作者:M. G. Muller , F. Steidle, M. J. Schuster , P. Lutz, M. Maier, S. Stoneman, T. Tomic, W. Sturzl
来源:2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
编译:颜青松
审核:陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文展示了一个使用两对大广角立体相机的飞行系统,能够快速完成感兴趣区域的地图。本文所使用的多轴直升机装备了两对大广角立体相机和一个IMU,可以进行鲁邦的视觉导航,并快速的进行三维建图。

图1 上图是本文所用的无人机系统,其中蓝色区域表示了两对立体相机的视角范围。
两对立体相机总共包括4个广角相机,垂直视角高达240度,这意味着该系统可以适用于非常狭窄的区域,例如洞穴。
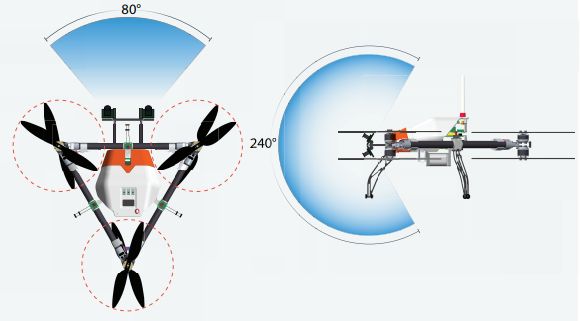
图2 上图展示了两对立体相机的视角范围
本文算法的核心在于从4个广角相机中模拟出8个针孔相机,因此可以组成4对针孔立体相机,并进行4个独立的VO系统,然后与IMU融合后就可以得到更加鲁邦的状态估计结果。

图3 上图展示了每一个广角相机生成的两个虚拟的中心投影影像
本文在微型飞行器进行了在线实验,实验结果表明了本文算法的鲁棒性,并展示了三维地图的结果。
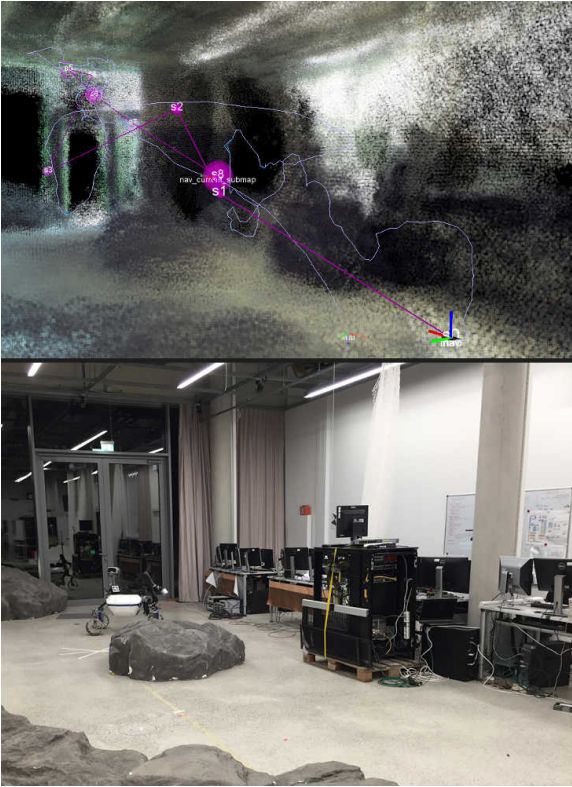
图4 上图展示了本文算法的一个结果,其中上图展示了三维地图和飞行器的轨迹,下图是该场景的一个示意图。

Abstract
The here presented flying system uses two pairsof wide-angle stereo cameras and maps a large area of interestin a short amount of time. We present a multicopter systemequipped with two pairs of wide-angle stereo cameras andan inertial measurement unit (IMU) for robust visual-inertialnavigation and time-efficient omni-directional 3D mapping. Thefour cameras cover a 240 degree stereo field of view (FOV)vertically, which makes the system also suitable for crampedand confined environments like caves. In our approach, wesynthesize eight virtual pinhole cameras from four wide-anglecameras. Each of the resulting four synthesized pinhole stereosystems provides input to an independent visual odometry(VO). Subsequently, the four individual motion estimates arefused with data from an IMU, based on their consistency withthe state estimation. We describe the configuration and imageprocessing of the vision system as well as the sensor fusionand mapping pipeline on board the MAV. We demonstratethe robustness of our multi-VO approach for visual-inertialnavigation and present results of a 3D-mapping experiment.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



