康奈尔大学发布代替激光雷达检测物体新方法|厚势

厚势按:不用激光雷达也可以准确检测车辆周围的物体。研究人员发现,立体摄像头的数据准确度几乎媲美激光雷达。
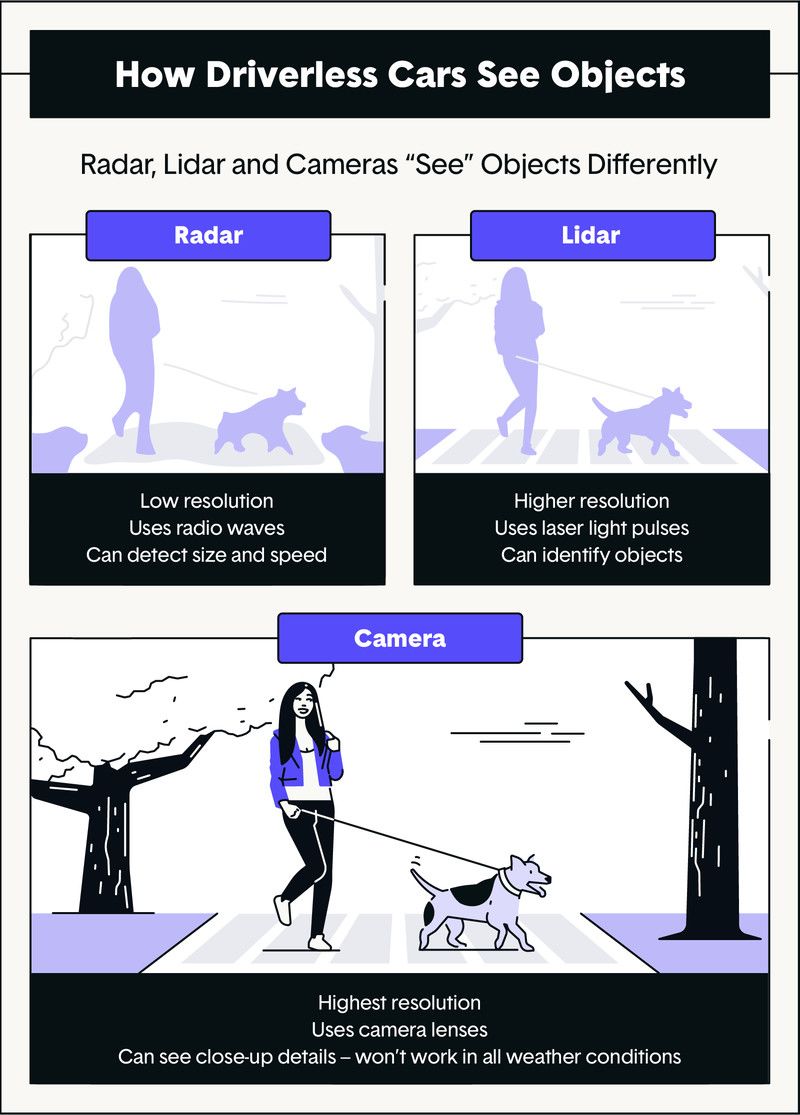
「人们普遍认为,如果没有激光雷达,就无法制造自动驾驶汽车」, Weinberger说。「至少在论文阶段上,我们的研究人员已经证明它是可能的。」
编辑:琪琪
来源:智车科技
入群:加微信号 autoHS,入厚势汽车科技群与行业专家讨论更多自动驾驶和新能源汽车行业信息
-END-


精选文章
厚
势
汽
车
为您对接资本和产业
新能源汽车 自动驾驶 车联网
联系微信:autoHS
或 183 0185 8119

点击阅读原文,查看文章「世界人工智能大会火星撞地球,马云PK马斯克(全文实录)」
登录查看更多
相关内容

康奈尔大学(Cornell University)是一所位于美国纽约州伊萨卡的私立研究型大学,另有两所分校位于纽约市和卡塔尔教育城,是著名的常春藤盟校成员,在世界范围内享有极高的学术声誉。康奈尔大学有七个本科生学院和七个研究生学院,是一所松散型的大学,其下属学院在运作时拥有很大的自主权,它们可以自己制订学术计划、自主招生和自行授予学位。
专知会员服务
27+阅读 · 2020年1月17日
专知会员服务
34+阅读 · 2019年12月25日
Arxiv
12+阅读 · 2020年6月10日
Arxiv
9+阅读 · 2018年8月30日




相关VIP内容
专知会员服务
27+阅读 · 2020年1月17日
专知会员服务
34+阅读 · 2019年12月25日
相关资讯
相关论文
Arxiv
12+阅读 · 2020年6月10日
Arxiv
9+阅读 · 2018年8月30日