上汽乘用车:智能驾驶汽车传感器介绍及布置 | 厚势

厚势按:文章介绍了智能驾驶汽车各环境感知传感器(超声波雷达、毫米波雷达、激光雷达、单/双/三目摄像头、环视摄像头)的特点和布置位置,举例说明了在特殊场景下的安全隐患,并重点讲解了毫米波雷达在整车上的布置要求,为环境感知传感器在其他车型上的布置提供参考。
本文来自 2017 年 11 月 10 日出版的《上海汽车》,作者是上汽集团乘用车技术中心的陆炳华、刘婷和张海滨 。
0 引言
随着汽车保有量的增多,交通事故频发,提高汽车的主动安全性,发展智能驾驶汽车,是未来汽车产业的趋势,针对智能驾驶车辆相关技术展开的研究具有重大意义和工程应用前景[1]。
智能驾驶汽车通过环境感知传感器获取道路周边环境信息,传感器的选择和布置方案都会影响获取信息的有效性和完整性。
1 介绍
1.1 智驾分级介绍
根据车辆的自动化水平,美国机动车工程师协会(SAE)对智能驾驶技术进行了划分,主要分为 6 个等级,如表 1 所示。
表 1 智能驾驶技术等级划分
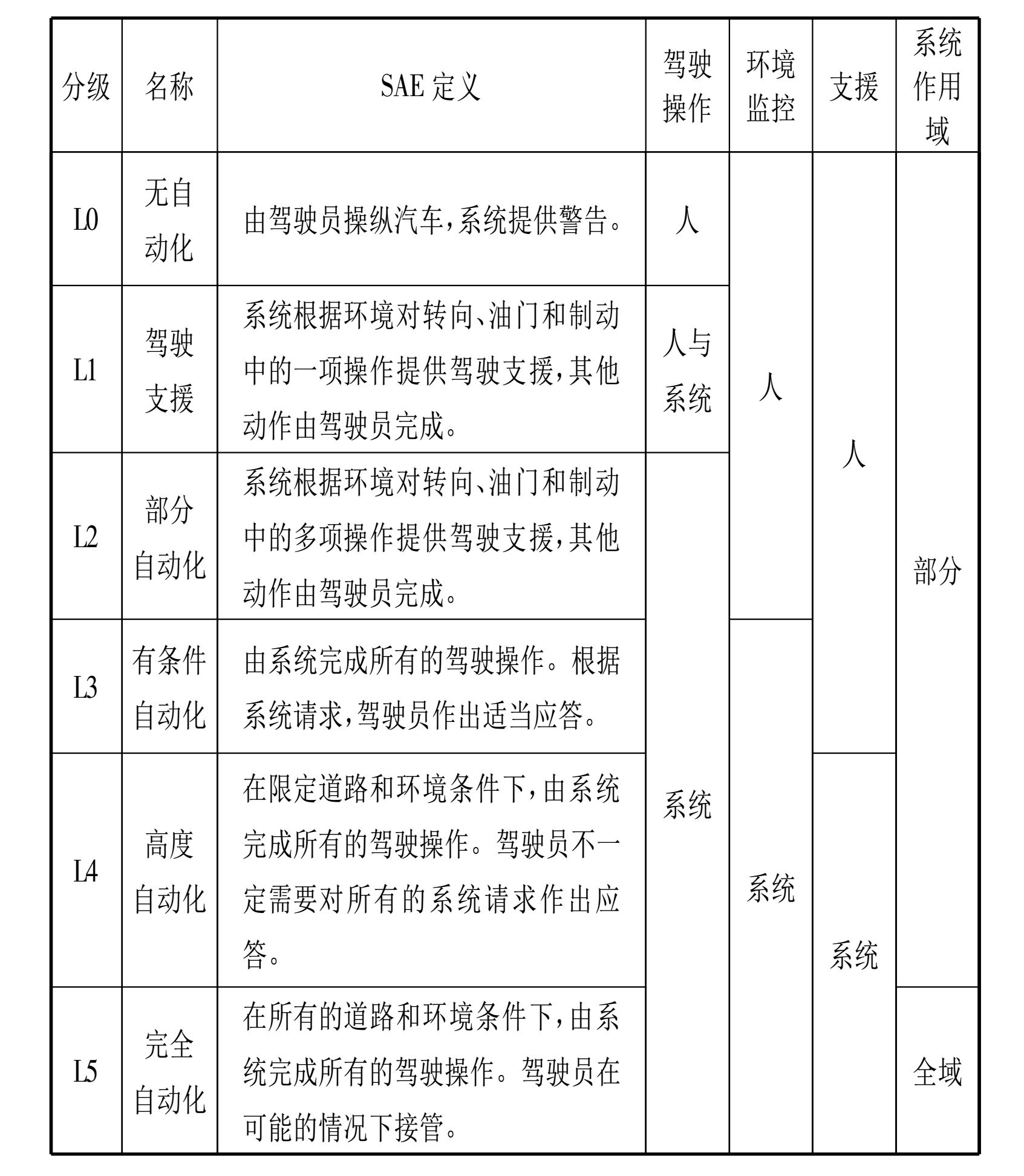
现阶段,L3 级别的智能驾驶汽车即将量产上市。L4、L5 级别的智能驾驶汽车也已在特定范围内的道路上进行了长期测试。
1.2 传感器介绍
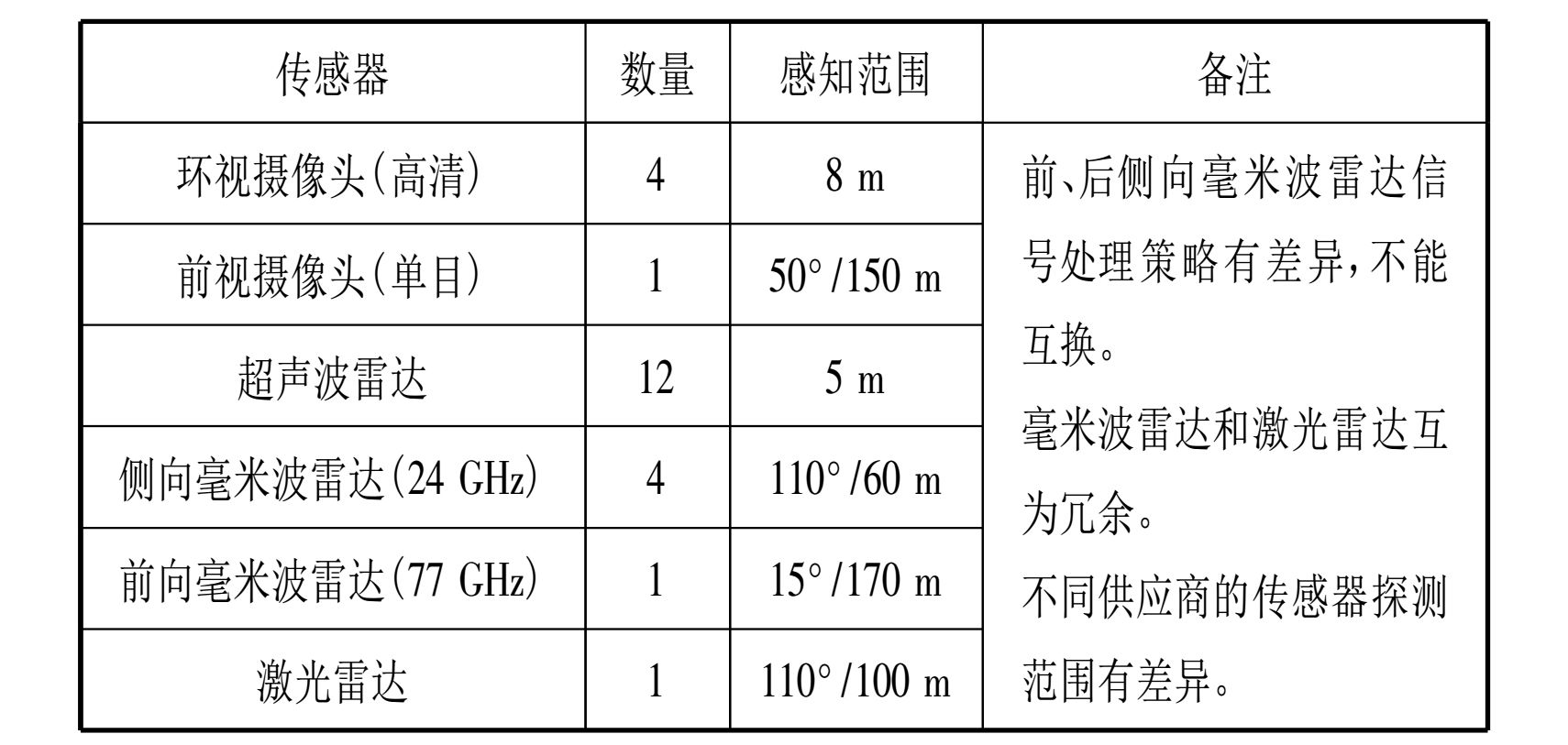
智能驾驶汽车环境感知传感器主要有超声波雷达、毫米波雷达、激光雷达、单/双/三目摄像头、环视摄像头以及夜视设备 [2-4]。目前,处于开发中的典型智能驾驶车传感器配置如表 2 所示。
表 2 智能驾驶汽车传感器配置
环视摄像头:主要应用于短距离场景,可识别障碍物,但对光照、天气等外在条件很敏感,技术成熟,价格低廉;
摄像头:常用有单、双、三目,主要应用于中远距离场景,能识别清晰的车道线、交通标识、障碍物、行人,但对光照、天气等条件很敏感,而且需要复杂的算法支持,对处理器的要求也比较高;
超声波雷达:主要应用于短距离场景下,如辅助泊车,结构简单、体积小、成本低;
毫米波雷达:主要有用于中短测距的 24 GHz 雷达和长测距的 77 GHz 雷达 2 种。毫米波雷达可有效提取景深及速度信息,识别障碍物,有一定的穿透雾、烟和灰尘的能力,但在环境障碍物复杂的情况下,由于毫米波依靠声波定位,声波出现漫反射,导致漏检率和误差率比较高;
激光雷达:分单线和多线激光雷达,多线激光雷达可以获得极高的速度、距离和角度分辨率,形成精确的 3D 地图,抗干扰能力强,是智能驾驶汽车发展的最佳技术路线,但是成本较高,也容易受到恶劣天气和烟雾环境的影响。
不同传感器的感知范围均有各自的优点和局限性(见图 1),现在发展的趋势是通过传感器信息融合技术,弥补单个传感器的缺陷,提高整个智能驾驶系统的安全性和可靠性 [3]。
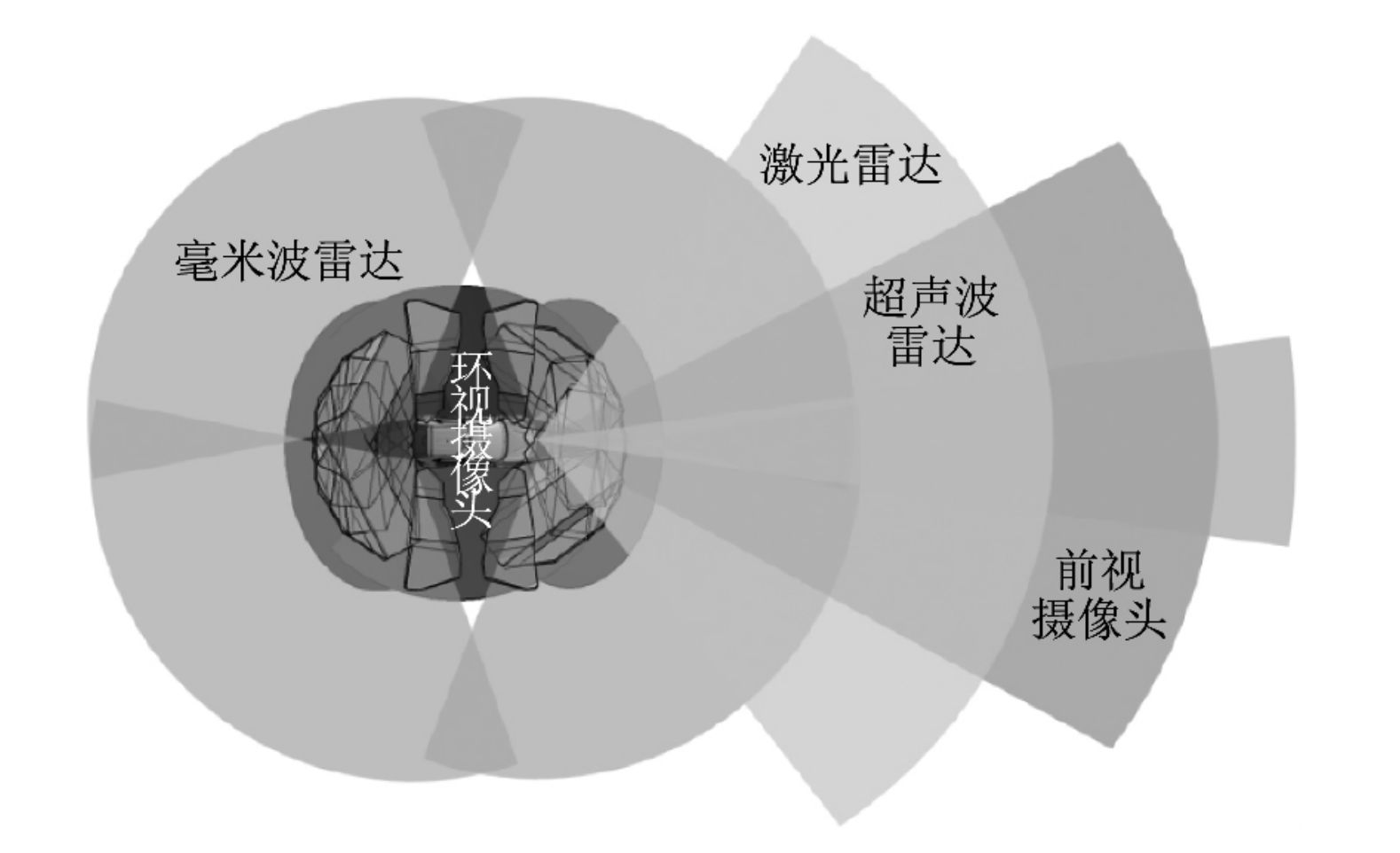
图 1 环境感知传感器感知范围示意图
2 特殊场景下的安全问题
按照上文,环境感知传感器配置在某些场景下还存在安全隐患。例如,车辆刚驶出高速公路服务区,准备自动变道:初始车速 V1=60km/h;变道过程约需要 t = 3 s;变道完成时与后方车辆的车间时距 τ ≥ 2 s (注 1)左后方来车车速 V2 = 120 km/h;为保证变道安全,本车与左后方车辆的初始安全距离至少为
(V2-V1)×(t+τ)=(120km/h-60km/h)×(3s+2s) ≈ 83m
一般后向 24 GHz 毫米波雷达的探测距离为 60 m 左右,因此 60~83 m 是危险距离。若前后车距在此范围内,开始变道时,系统误判为符合变道条件。随着左后方车辆高速接近,自动变道过程中安全距离不足,本车中途终止变道,返回本车道继续行驶。这种情况会干扰其他车辆的正常驾驶,存在安全隐患,也会给本车的乘员带来不安全感(见图 2)。
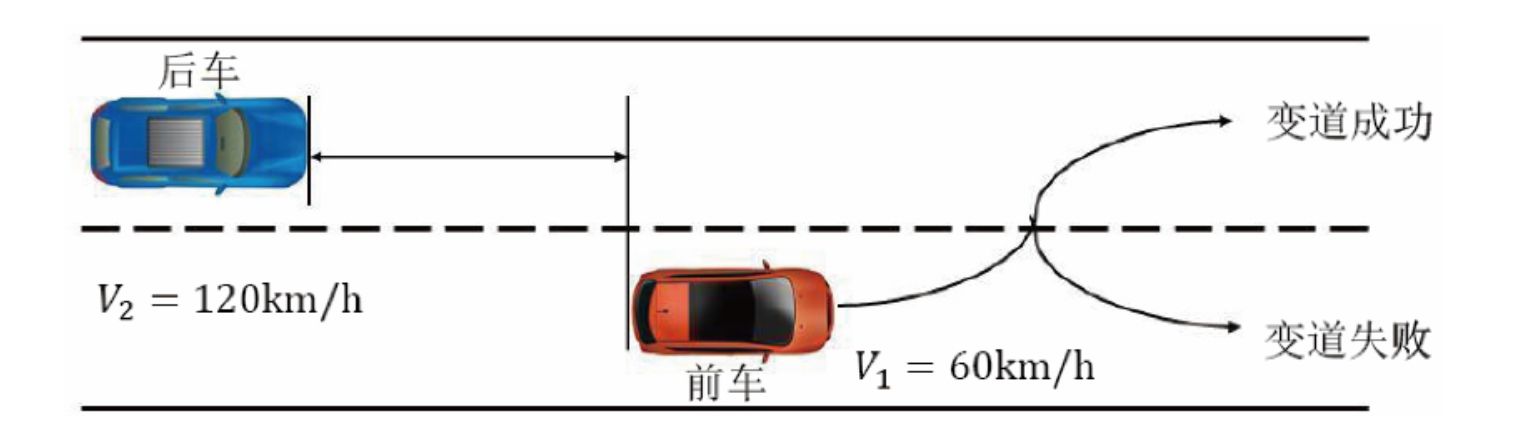
图 2 自动变道场景
要解决这个极端场景下智能驾驶汽车自动变道的安全问题,可以考虑增加一个 77 GHz 后向毫米波雷达(注 2),它的探测距离可以达到 150 m 以上,完全能满足这个场景中 83 m 的探测距离要求。
注 1:目前自动变道无相关的法规要求, 故参考 GB /T20608-2006《智能运输系统自适应巡航控制系统性能要求与检测方法》中, 第5.2.2 条对自适应巡航的车间时距做出规定:τ_min 为可供选择的最小的稳态车间时距, 可适用于各种车速 v 下的 ACC 控制。τ_min ( v) 应大于或等于 1 s,并且至少应提供一个在 1.5 ~ 2.2 s 区间内的车间时距 τ。在自动变道场景的计算中,为保证安全,选取 τ = 2 s 进行计算。
注 2:也可以采用探测距离达到 100 m 以上的 8 线激光雷达或摄像头( 如 Tesla 车型) 解决 24 GHz 毫米波雷达探测距离不足的问题, 还可以通过控制算法设定车辆必须加速到一定车速才允许自动变道。
3 毫米波雷达的布置
目前,智能驾驶车辆只能实现部分场景的自动驾驶,为了能适应更多场景,
一方面,可以配置性能更好或数量更多的环境感知传感器;
另一方面,从降低整车成本考虑,还可以从传感器的布置优化方向入手,充分发挥传感器的性能。
智能驾驶车辆的传感器中,以需要考虑因素较多的毫米波雷达布置为例进行介绍。
3.1 毫米波雷达的位置
(1)正向毫米波雷达
正向毫米波雷达一般布置在车辆中轴线,外露或隐藏在保险杠内部。雷达波束的中心平面要求与路面基本平行,考虑雷达系统误差、结构安装误差、车辆载荷变化后,需保证与路面夹角的最大偏差不超过 5°。
另外,在某些特殊情况下,正向毫米波雷达无法布置在车辆中轴线上时,允许正 Y 向最大偏置距离为 300 mm,偏置距离过大会影响雷达的有效探测范围。
(2)侧向毫米波雷达
侧向毫米波雷达在车辆四角呈左右对称布置,前侧向毫米波雷达与车辆行驶方向成 45° 夹角,后侧向毫米波雷达与车辆行驶方向成 30° 夹角,雷达波束的中心平面与路面基本平行,角度最大偏差仍需控制在 5° 以内。
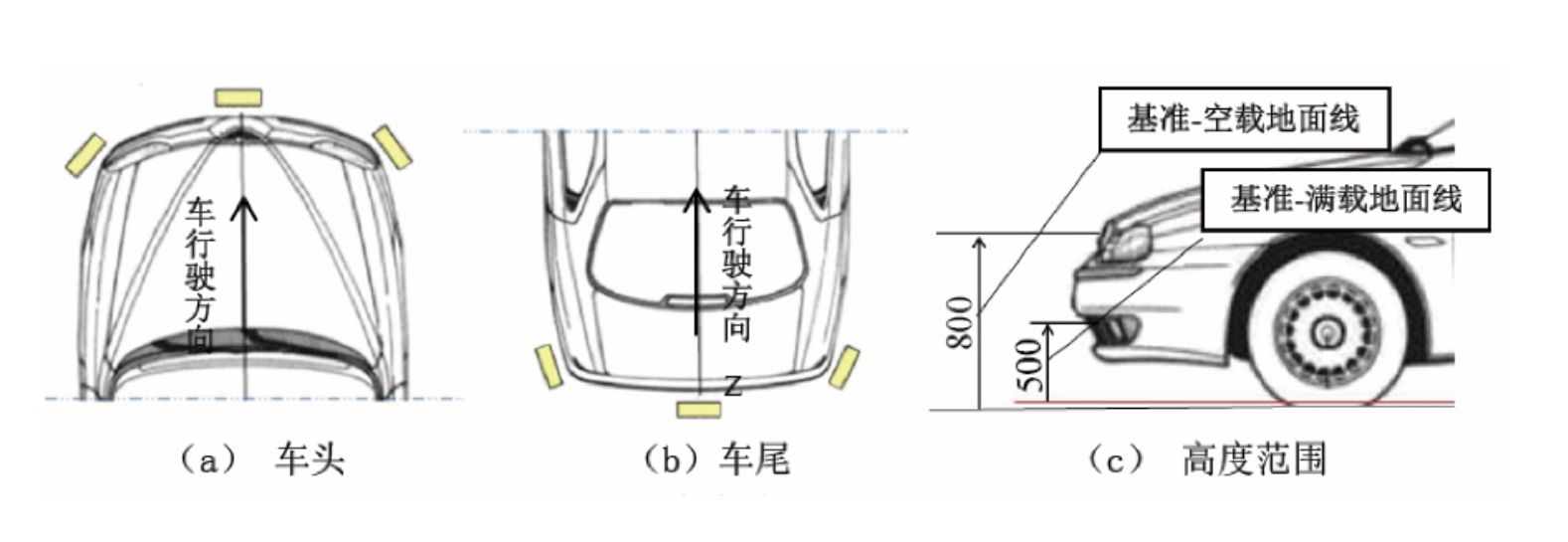
图 3 毫米波雷达位置
(3)毫米波雷达的布置高度
毫米波雷达在 Z 方向探测角度一般只有 ±5°,雷达安装高度太高会导致下盲区增大,太低又会导致雷达波束射向地面,地面反射带来杂波干扰,影响雷达的判断。因此,毫米波雷达的布置高度(即地面到雷达模块中心点的距离),一般建议在 500(满载状态)~800 mm(空载状态)之间(见图 3)。
3.2 表面覆盖材料
毫米波雷达大多数情况都是隐藏布置,采用某些不合适的表面覆盖材料会屏蔽毫米波或引起波束畸变、驻波变差,使雷达失效或灵敏度降低。因此选用的覆盖物材料有如下要求。
(1)优先选用 PC、PP、ABS、TPO 等电解质传导系数小的材料,这些材料中不能夹有金属和碳纤维。如果材料表面有低密度金属涂层(如车漆),虽对雷达性能影响不是很大,但必须经过测试才可使用。
(2)覆盖物的表面必须平滑且厚度均匀,不能出现料厚突变或结构复杂的情况,且厚度最好是雷达半波长的整数倍,以减少对雷达波的扭曲和衰减。
另外,覆盖物与雷达面的距离也不能太大,否则雷达容易把覆盖物误判为障碍物。在实际布置中,一般把雷达和覆盖物之间的距离控制在 50~150 mm,如果在造型设计阶段就把毫米波雷达数据输入给造型设计师,经过造型优化,最小距离可控制在 15 mm 左右。
3.3 毫米波雷达布置其他参考因素
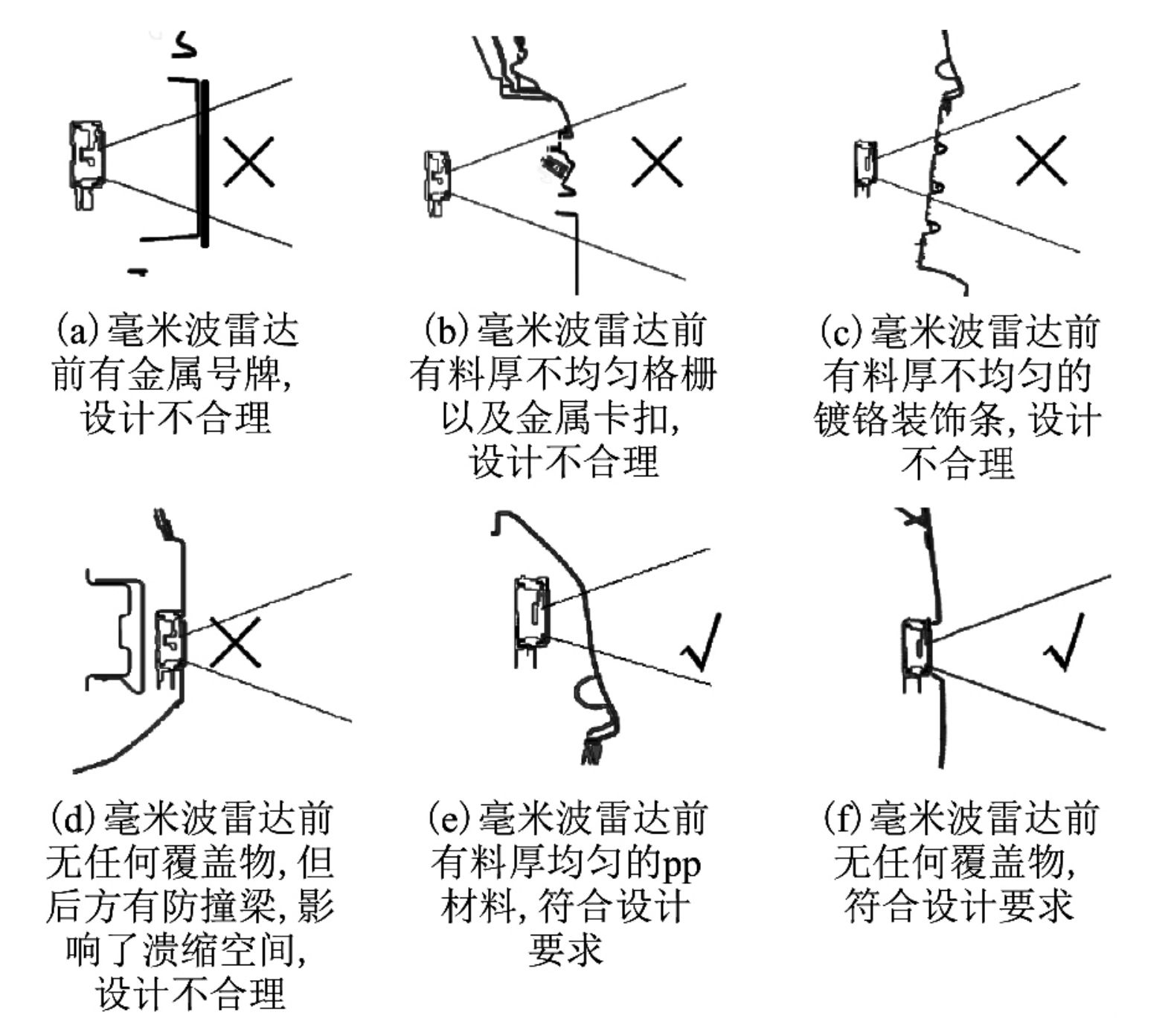
图 4 毫米波雷达布置示例
除以上毫米波雷达本身要求外,在布置时,还需要兼顾考虑其他因素,如:雷达区域外造型的美观性、对行人保护的影响、设计安装结构的可行性、雷达调试的便利性、售后维修成本等问题 [5]。以下是一些示例(见图 4)。
4 结语
目前的传感器配置和性能无法满足某些场景下的探测需求,距实现全天候的智能驾驶还有很大差距。一方面需要开发性能更好、多功能融合的低成本环境感知传感器。另一方面,则可以结合 V2X 车联网技术,使得车与车、车与基础设施、车与行人之间共享信息,弥补环境感知传感器探测范围有限、对气候及环境要求高等缺陷,能有效提高智能驾驶的安全性,保障行人与车辆的安全 [6]。
参考文献
[1] 王艺帆.自动驾驶汽车感知系统关键技术综述 [J].汽车电器,2016(12):12 ~ 16.
[2] 沈峘.智能车辆视觉环境感知技术的研究 [D].南京:南京航空航天大学,2010.
[3] 陈晓伟.汽车前方车辆识别的雷达和视觉信息融合算法开发 [D].吉林:吉林大学,2016.
[4] Araki H,Yamada K,Hiroshima Y et al. Development of rear-end collision avoidance system [C]. Intelligent Vehicles Symposium Proceedings of IEEE, 2002: 224 ~ 229
[5] 付银玲.长测距雷达在轿车上的布置应用 [J].上海汽车,2012(7):15 ~ 18.
[6] 王群,钱焕延.车联网体系结构及感知层关键技术研究 [J].电信科学,2012,28(12):1-9.
编辑整理:厚势分析师拉里佩
转载请注明来自厚势和厚势公号:iHoushi
-END-
文章精选
企业家
智能驾驶
新能源汽车
项目和评论
这些大神从Google出走,创办了五家(命运各异的)无人车公司
厚
势
汽
车
为您对接资本和产业
新能源汽车 自动驾驶 车联网
联系邮箱
bp@ihoushi.com

点击阅读原文,查看文章「中国新能源汽车商业化发展现状及国际比较研究」