代码:Learning by Playing –Solving Sparse Reward Tasks from Scratch
https://github.com/HugoCMU/pySACQ
https://zhuanlan.zhihu.com/p/34222231
PySACX
This repo contains a Pytorch implementation of the SAC-X RL Algorithm [1]. It uses the Lunar Lander v2 environment from OpenAI gym. The SAC-X algorithm enables learning of complex behaviors from scratch in the presence of multiple sparse reward signals.
Theory
In addition to a main task reward, we define a series of auxiliary rewards. An important assumption is that each auxiliary reward can be evaluated at any state action pair. The rewards are defined as follows:
Auxiliary Tasks/Rewards
Touch. Maximizing number of legs touching ground
Hover Planar. Minimize the planar movement of the lander craft
Hover Angular. Minimize the rotational movement of the lander craft
Upright. Minimize the angle of the lander craft
Goal Distance. Minimize distance between lander craft and pad
Main Task/Reward
Did the lander land successfully (Sparse reward based on landing success)
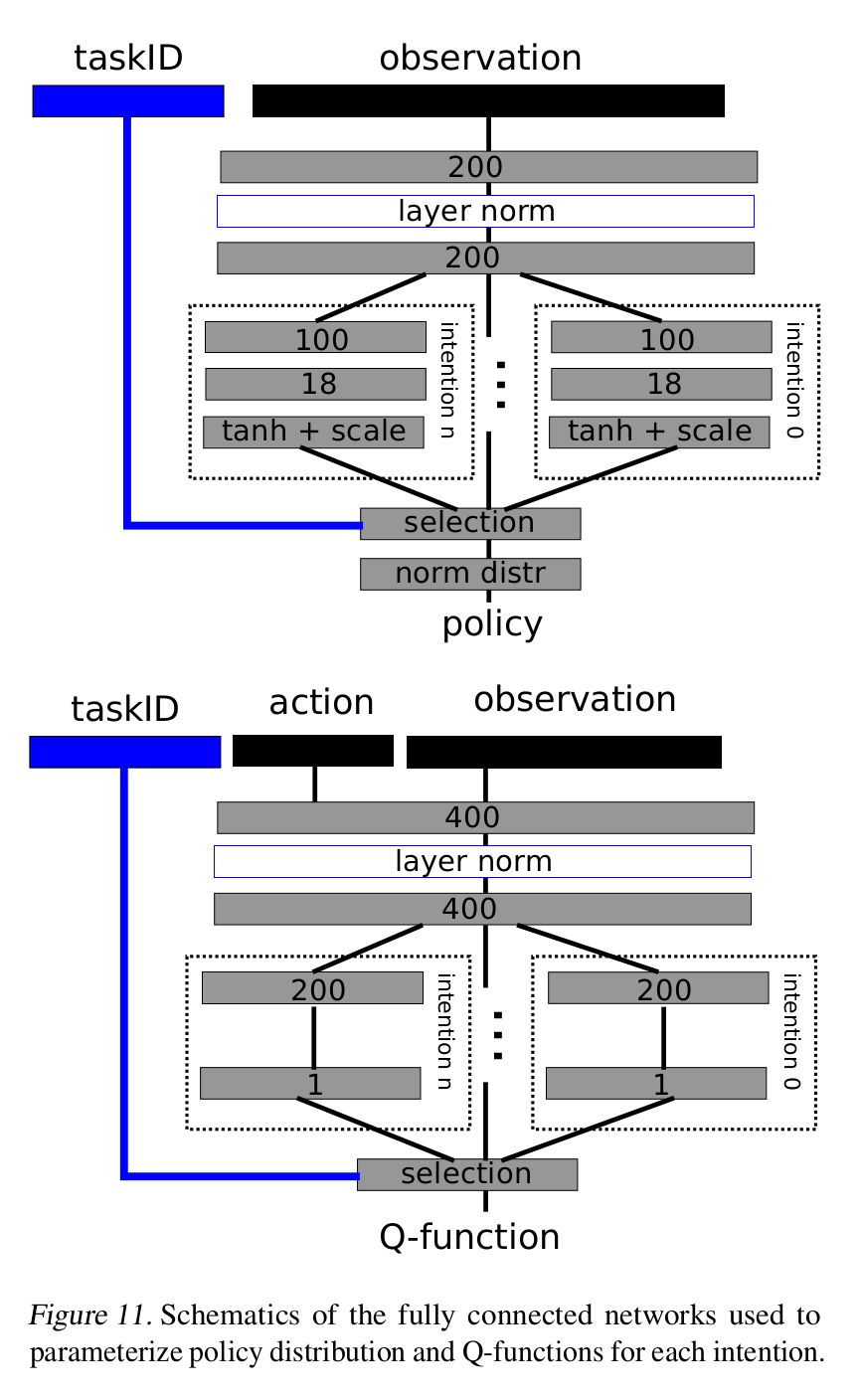
Each of these tasks (intentions in the paper) has a specific model head within the neural nets used to estimate the actor and critic functions. When executing a trajectory during training, the task (and subsequently the model head within the actor) is switched between the different available options. This switching can either be done randomly (SAC-U) or it can be learned (SAC-Q).
The pictures below show the network architechtures for the actor and critic functions. Note the N possible heads for Npossible tasks (intentions in the paper) [1].
Learning
Learning the actor (policy function) is done off-policy using a gradient based approach. Gradients are backpropagated through task-specific versions of the actor by using the task-specific versions of the critic (Q function). Importantly though, the trajectory (collection of state action pairs) need not have been collected using the same task-specific actor, allowing learning from data generated by all other actors. The actor policy gradient is computed using the reparameterization trick (code in model.py)
Learning the critic (Q function) is similarly done off-policy. We sample trajectories from a buffer collected with target actors (actor policies frozen at a particular learning iteration). The critic policy gradient is computed using the retrace method (code in model.py)
Instructions
Use the
local/template.shscript to train lots of model variations. Or usetrain.pyto train an agent directly.
Requirements
Python 3.6
PyTorch 0.3.0.post4
OpenAI Gym
tensorboardX
Sources
[1] Learning by Playing – Solving Sparse Reward Tasks from Scratch.