【泡泡一分钟】CoSLAM:针对动态场景设计多相机协同的SLAM系统
每天一分钟,带你读遍机器人顶级会议文章
标题:CoSLAM:Collaborative Visual SLAM in Dynamic Environments
作者:Danping Zou and Ping Tan
来源:TPAMI 2013
编译:鲁涛
播音员:火箭姚小麦
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天向大家介绍Danping Zou老师与Ping Tan老师在13年发表的工作: “CoSLAM:Collaborative Visual SLAM in Dynamic Environments ”——针对动态场景设计的多相机协同SLAM系统。
本文涉及了视觉SLAM领域中的两个重要问题:动态环境与多相机协同。每个相机可以独立运动,平台不限,这些相机将协同构建同一个全局地图,地图包括环境静态点的3D位置以及动态点的运动轨迹。
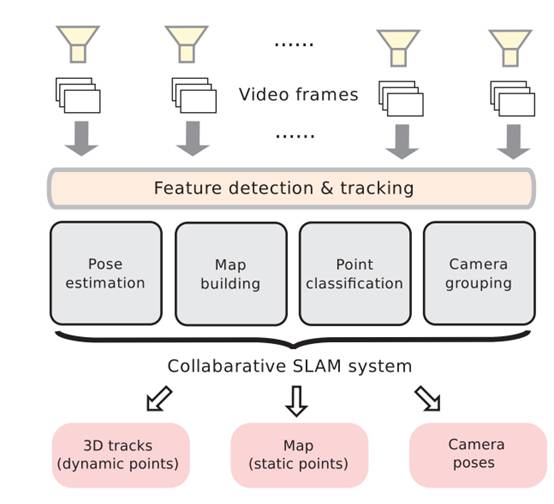
图1. 系统框架
在位姿估计方面,文章首先详细介绍了如何建立单个相机的位姿估计函数,主要是约束重投影误差的思路;然后,针对动态场景,作者设计了多相机协同的优化方案,与前者的区别在于:优化函数中加入了动态点的约束。
本文在建图方面的工作也可圈可点。每个相机会独立建立静态点的3D地图,对于相机间协作,作者用ZNCC(即Zero-mean Normalized Cross Correlation)计算图像间的匹配关系,然后再用三角化的方式建立地图。为了增强系统的鲁棒性,作者考虑了每个地图点位置的不确定性。至于静态点与动态点的区分,作者首先将所有的点都当作静态点,然后根据重投影误差进行判别:如果某个点对于单个相机帧的重投影误差超过阈值,则将该点的类别标为“未知”,这时候再结合其它相机的信息,就能判断出该点是否为动态点。
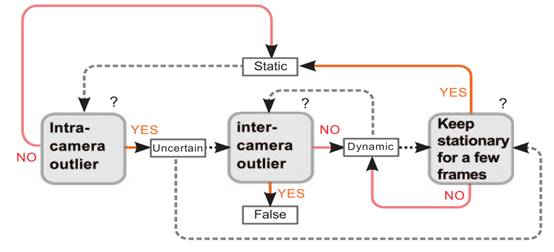
图2. 动态点与静态点的区分
为了加快相机间的协作,作者采用了分组的策略,视觉信息重叠度超过一定阈值的相机将作为同一组相机,每次处理相机间约束时,只会考虑处在同一组的相机。这里的分组可能会经常变化,因此作者设计了可实时运行的组分离与融合策略。
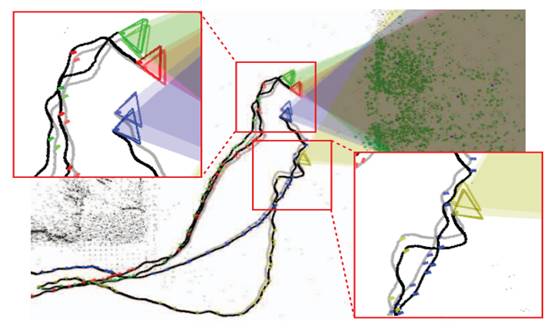
图3. 多相机协同运行示意图
实验表明,本系统可在高度动态的环境中鲁棒地运行,静态环境中运行的精度也比较高,Youtube上有详细的演示视频,本文的代码也已经开源。
【原文摘要】
Abstract—This paper studies the problem of vision-based simultaneous localization and mapping (SLAM) in dynamic environments with multiple cameras. These cameras move independently and can be mounted on different platforms. All cameras work together to build a global map, including 3D positions of static background points and trajectories of moving foreground points. We introduce intercamera pose estimation and intercamera mapping to deal with dynamic objects in the localization and mapping process. To further enhance the system robustness, we maintain the position uncertainty of each map point. To facilitate intercamera operations, we cluster cameras into groups according to their view overlap, and manage the split and merge of camera groups in real time. Experimental results demonstrate that our system can work robustly in highly dynamic environments and produce more accurate results in static environments.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
回复关键字“CoSLAM”,即可获取原文、演示视频和代码的下载链接。

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





