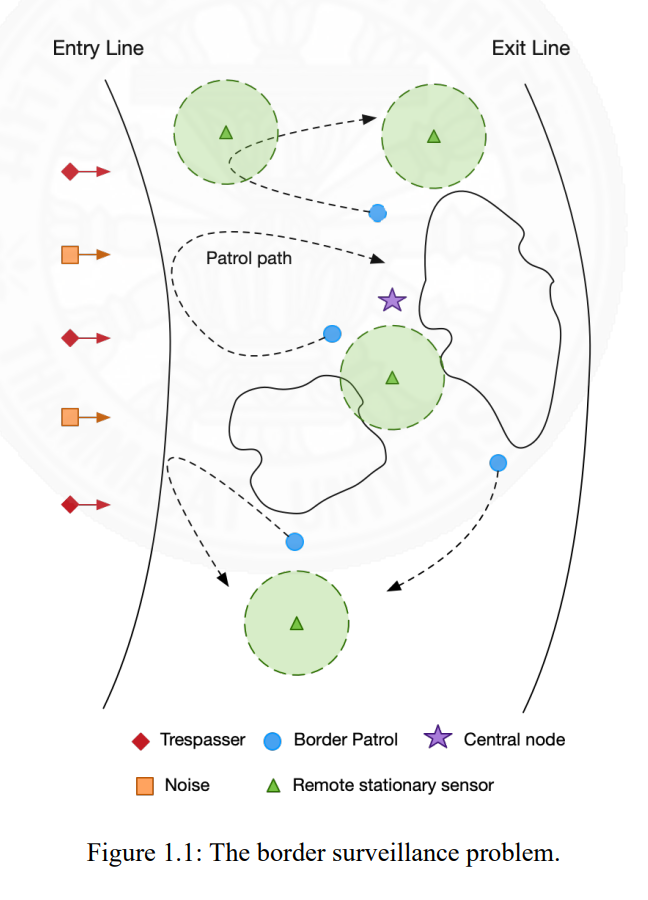
如果在一个大的边境地区部署数量有限的边境巡逻队,边境控制就会变得非常具有挑战性。为了弥补边境巡逻队数量有限的不足,边境巡逻队可以动态监控一个区域的不同部分,从而提供动态覆盖。如果入侵者随机移动,那么边境巡逻队的最佳策略就是随机移动。然而,现实中的非法闯入者通常会根据环境特征和该区域过去的非法闯入统计资料来规划自己的路径。他们会按照规划好的路线行进,而不是随意行动。更聪明的入侵者会定期调整自己的行进路线,以避免被捕获。为了克服闯入者的自适应智能行为,边境巡逻队应根据当前掌握的与闯入者有关的知识,对该区域进行自适应监控。由于典型的边境地区面积大、障碍物多,可能无法精确了解入侵者的位置。在这种情况下,可以根据边界地区的已知特征和从发现的痕迹中得出的可观察到的足迹进行假设,将知识归档。
本文从两个方面利用了边境巡逻队的巡逻路径规划。第一方面考虑了不可观测的环境,即边境巡逻队无法观测到非法入侵者的当前位置。边境巡逻队只能依靠对该地区已知特征的假设。在这种环境下,边境巡逻队的巡逻路径规划应基于根据已知区域特征构建的启发式。此外,启发式应适应区域的动态特征。第二个方面考虑了部分可观测环境,在这种环境中,非法闯入者的位置可以部分观测到,但具有不确定性。在第二方面,假定闯入者具有适应性,可能不会根据已知的区域特征流畅地行进。边境巡逻的路径应根据对不确定信息的实时观察进行自适应规划。除了这两种拟议的巡逻路径规划方案外,本论文还提出了有助于解决边境监控问题的必要模型。
实证实验是通过模拟代理进行的,模拟代理在模拟边境地区有特定的行为。在不同场景下,对所提出的巡逻规划方案的性能进行了评估,并与其他巡逻路径规划方案进行了比较。结果表明,在边境地区具有异质性特征且非法闯入者被部分观察到的情况下,拟议的巡逻路径规划方案在非法闯入者检测率方面优于其他方案。