
如今,许多机器人系统都是远程操作的,需要不间断的连接和安全的任务规划。这类系统常见于军用无人机、搜救行动、采矿机器人、农业和环境监测等领域。不同的机器人系统可能采用不同的通信方式,如无线电网络、可见光通信、卫星、红外线、Wi-Fi 等。然而,在机器人需要相互连接的自主任务中,由于信号超出范围或不可用,经常会出现通信受限的环境。此外,一些自动化项目(建筑施工、装配线)无法保证不间断的通信,因此需要一个安全的项目计划,以优化碰撞风险、成本和工期。在本论文中,我们提出了四管齐下的方法来缓解上述问题: 1) 通信感知世界地图;2) 使用视线(LoS)进行通信保护;3) 通信感知安全规划;以及 4) 用于导航的多目标运动规划。
首先,重点开发了一种通信感知世界地图,它将传统的世界模型与多机器人位置规划相结合。我们提出的通信地图可选择一连串中间中继车辆的最佳位置,以便最大限度地提高与远程单元的通信质量。我们还提出了一种算法,当有多个远程单元需要服务时,可以建立一棵最小阿伯累树(min-Arborescence tree)。 其次,在通信被剥夺的环境中,我们利用视线(LoS)在移动机器人之间建立通信,控制它们的移动并向其他自主单元转发信息。我们提出并研究了多机器人中继网络定位问题的复杂性,并提出了近似算法,通过重新定位一个或多个机器人来恢复基于可见度的连接。
第三,开发了一个框架,用于量化全自动机器人任务的安全得分,在这种任务中,人与机器人的共存可能会带来碰撞风险。我们使用运动规划算法分析了一系列备用任务计划,以选择最安全的计划。
最后,为机器人开发了一种基于多目标优化的高效路径规划,以处理若干帕累托最优成本属性。
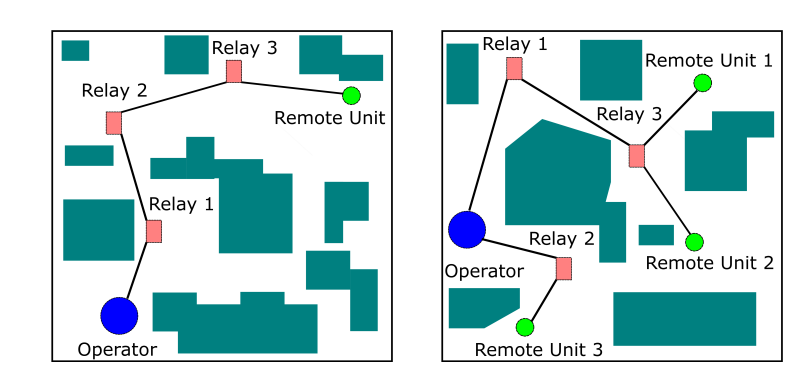
图 2.1:(a) 由三个机器人组成的链,它们将操作员的通信转发给远程单元;(b) 包含三个中继器的最小生成树,优化了操作员与三个单元之间的通信。


