
随着无人驾驶系统在各个领域日益普及,确保智能体有能力获得可靠的导航估计变得更加重要。对抗性环境会产生更多的问题,限制了无人智能体可用的导航方法。可以假定,除全球导航卫星系统(GNSS)接收器外,无人智能体还携带一种或多种传感能力。在有争议的环境中,无法保证使用全球导航卫星系统进行位置估计,因此必须考虑其他方法。随着替代导航技术的日益普及,必须将最新技术纳入自主规划,以便在规划问题期间考虑到导航状态的需要。
虽然许多规划算法都展示了对单一非全球导航卫星系统测量过程的使用,但还没有一种算法展示了对多个传感域和替代导航(alt-nav)技术的使用,以提供通过有争议环境的稳健导航计划。本文包括开发一种基于采样的信念空间规划(BSP)算法,该算法考虑到了多种替代导航测量技术,命名为快速探索随机信念替代导航图(RRBANG)算法。这项研究填补了规划研究与 Alt-nav 研究之间的空白,充分利用了两者的优势,根据智能体的各种感知能力,为到达目的地制定了稳健的计划。
附带的工作侧重于通过可观测环境进行规划,利用多个感知域找到通往目标区域的最佳路径。RRBANG 算法利用离线规划中可用的信息,通过各种导航技术和可用的传感器,在避开障碍物的同时,制定出一条通过空间的初始最佳轨迹。该算法采用用户自定义的成本函数,允许用户确定可接受的风险以及目标区域内路径长度和不确定性之间的权衡。
RRBANG 能够利用域内更多可用的多个传感域,从而克服某些辅助导航技术的局限性。有些领域因环境而存在很大的局限性,例如在缺乏一致视觉地标的水体或大森林中尝试使用基于视觉的导航(VisNav)技术。RRBANG 同时实现了视觉导航、通信测距和标量地图匹配(SMM)等导航方法,为无人智能体提供了强大的初始计划。

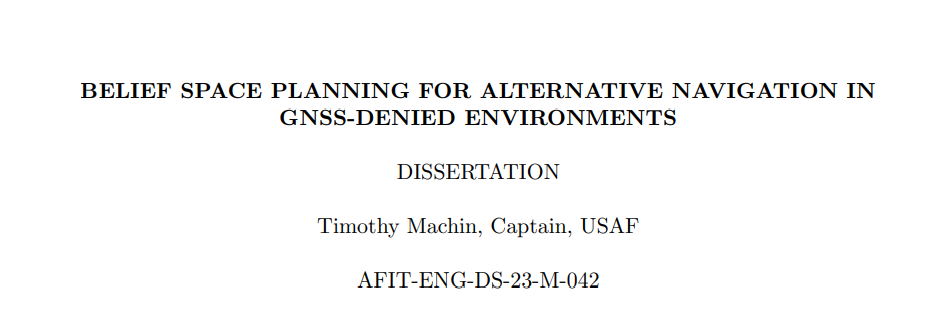
图6。规划框架
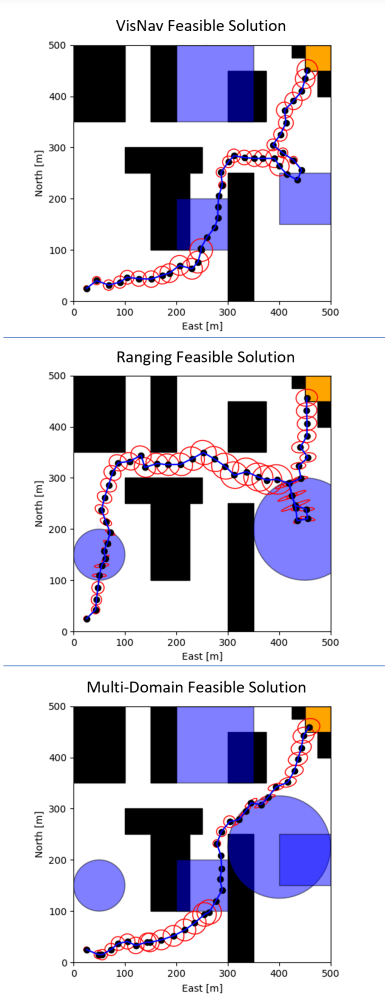
图 33. 顶部) 仅利用视觉丰富的区域,在障碍物密集的环境中找到的解决方案路径。这样做是为了确保至少有一个域存在稳健可行的路径。中图)使用测距测量域返回的可行解决方案。下图)利用所有传感域找到的多域解决方案,风险系数为 δ = 0.05。单独使用 SMMNav 时未发现可行方案。

