
本文的研究工作是为一个可扩展的圆柱形空投系统初步设计一个最佳导航控制器,该系统在平面运动中使用网格鳍进行控制。一系列军事和人道主义任务都需要精确的空投能力。已投入使用的空投系统并未达到预期的性能目标,尤其是在精度方面。在过去的行动中,空投系统精度不高造成的后果包括财产损失、人身伤害甚至人员伤亡。如今的空投系统也主要是为从一个或两个特定机身上投放大型有效载荷而建造的,这限制了操作的灵活性。本研究采用直接定位和分析方法来解决网格鳍控制精确空投系统的最优控制问题。优化控制问题包括两个阶段:控制下降和降落伞下降。计算了系统在不同风场下的最小和最大范围,以限定计算出的空气释放点的允许误差。假定可以实现最佳轨迹的实时计算,设计了控制法则算法和任务流程图。最后,测试了所提出的完整方法对初始条件扰动的鲁棒性。结果表明,分析方法的准确性和计算速度都很不错。这些轨迹和控制可作为未来精确空投系统的基线,以提高在实际场景中空投的精确度。
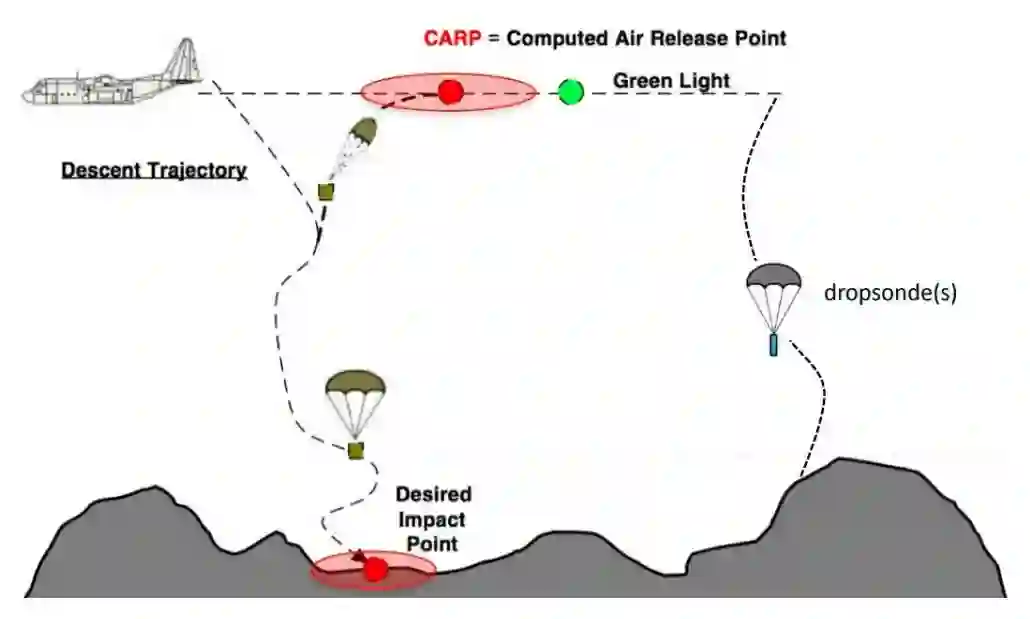
图 2:通用精确空投任务。
方法大纲
高层次方法如下:
1.为空投问题的两个阶段(控制下降和降落伞下降)建立系统模型,包括为系统的所有组件建立空气动力学模型。此外,必须对模型进行求解或模拟,以确保其符合预期。
2.决定将哪些因素(如失误距离、控制等)纳入最优控制问题的成本函数中,并为相应的求解方法(直接或间接搭配法)建立最优控制问题,同时纳入所有必要的边界和路径约束。
3.对每种求解方法进行初步评估,以确定是否适用于创建高层控制框架的整体问题,并随后构建该控制框架。
4.针对初始条件中的各种扰动和各种风廓线,评估计算最佳参考轨迹的建议方法。评估标准是该方法与基准解决方案相比所需的计算时间和准确性。
本文件编排如下: 第二章介绍了精确空投、风、最优控制理论以及系统不同组成部分的空气动力学建模的背景。第三章详细介绍了所使用的方法,首先定义了动力学模型和轨迹求解方法,然后概述了具体的优化控制问题,最后概述了高级控制框架和用于验证该控制框架的方法。第四章介绍了第三章中验证方法的结果。最后,第五章回答了第 1.3 节中提出的研究问题,根据结果得出了进一步的结论,并对未来工作提出了建议,以继续完善网格鳍控制精确空投系统。
