机器之心专栏机器之心编辑部****本篇文章为大家介绍清华大学在 CVPR 2023 的论文,Learning Imbalanced Data with Vision Transformers(用视觉 Transformer 学习长尾数据),代码已开源。
背景
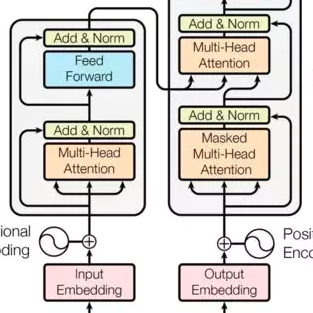
**在机器学习领域中,学习不平衡的标注数据一直是一个常见而具有挑战性的任务。近年来,视觉 Transformer 作为一种强大的模型,在多个视觉任务上展现出令人满意的效果。然而,视觉 Transformer 处理长尾分布数据的能力和特性,还有待进一步挖掘。
目前,已有的长尾识别模型很少直接利用长尾数据对视觉 Transformer(ViT)进行训练。基于现成的预训练权重进行研究可能会导致不公平的比较结果,因此有必要对视觉 Transformer 在长尾数据下的表现进行系统性的分析和总结。
- 论文链接:https://www.zhuanzhi.ai/paper/5d71014565ba29a679a64989cc54d0ab
- 代码链接:https://github.com/XuZhengzhuo/LiVT
本文旨在填补这一研究空白,详细探讨了视觉 Transformer 在处理长尾数据时的优势和不足之处。本文将重点关注如何有效利用长尾数据来提升视觉 Transformer 的性能,并探索解决数据不平衡问题的新方法。通过本文的研究和总结,研究团队有望为进一步改进视觉 Transformer 模型在长尾数据任务中的表现提供有益的指导和启示。这将为解决现实世界中存在的数据不平衡问题提供新的思路和解决方案。
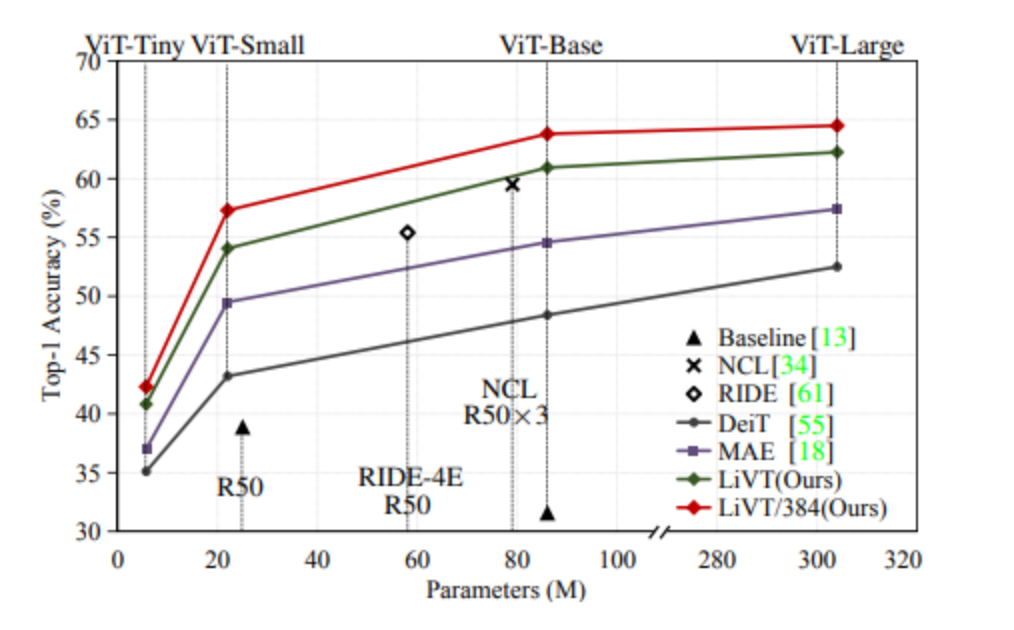
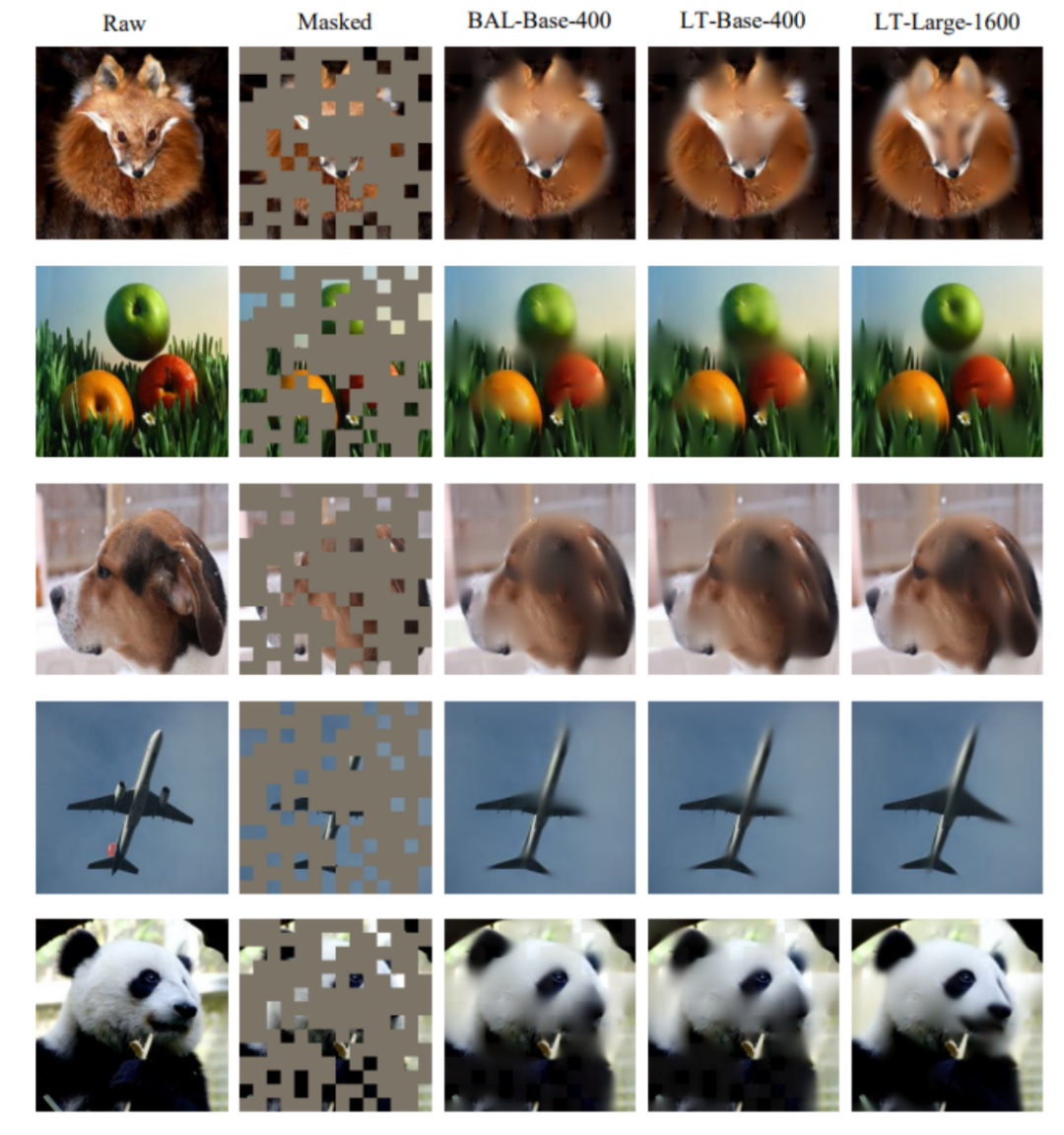
文章通过一系列实验发现,在有监督范式下,视觉 Transformer 在处理不平衡数据时会出现严重的性能衰退,而使用平衡分布的标注数据训练出的视觉 Transformer 呈现出明显的性能优势。相比于卷积网络,这一特点在视觉 Transformer 上体现的更为明显。另一方面,无监督的预训练方法无需标签分布,因此在相同的训练数据量下,视觉 Transformer 可以展现出类似的特征提取和重建能力。
基于以上观察和发现,研究提出了一种新的学习不平衡数据的范式,旨在让视觉 Transformer 模型更好地适应长尾数据。通过这种范式的引入,研究团队希望能够充分利用长尾数据的信息,提高视觉 Transformer 模型在处理不平衡标注数据时的性能和泛化能力。
文章贡献
本文是第一个系统性的研究用长尾数据训练视觉 Transformer 的工作,在此过程中,做出了以下主要贡献:
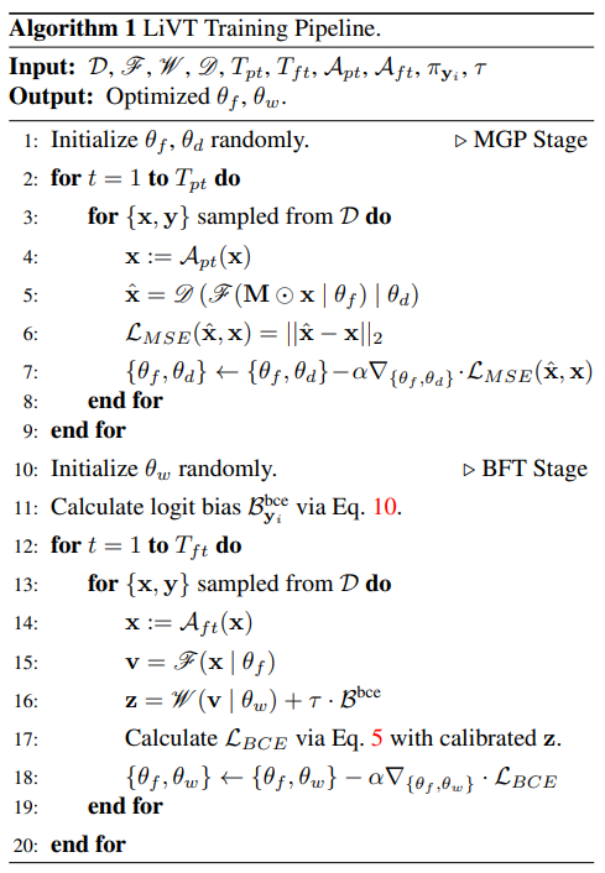
首先,本文深入分析了传统有监督训练方式对视觉 Transformer 学习不均衡数据的限制因素,并基于此提出了双阶段训练流程,将视觉 Transformer 模型内在的归纳偏置和标签分布的统计偏置分阶段学习,以降低学习长尾数据的难度。其中第一阶段采用了流行的掩码重建预训练,第二阶段采用了平衡的损失进行微调监督。
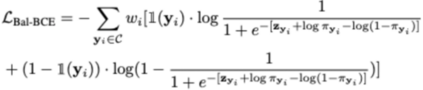
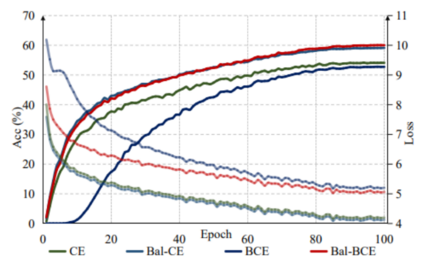
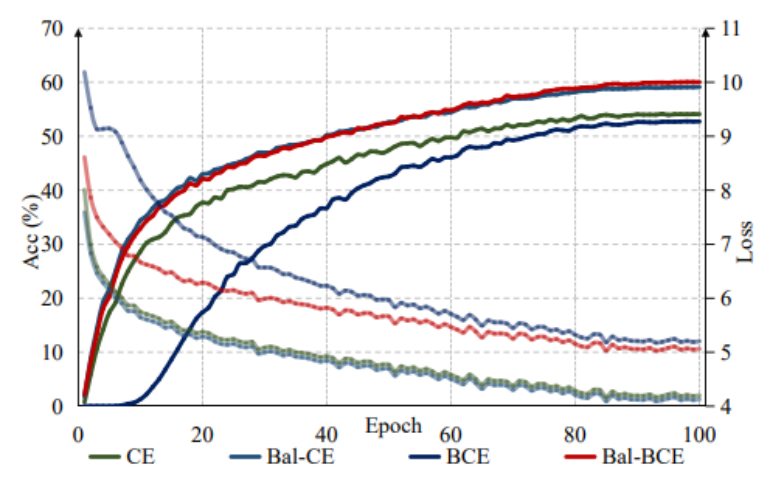
其次,本文提出了平衡的二进制交叉熵损失函数,并给出了严格的理论推导。平衡的二进制交叉熵损失的形式如下:
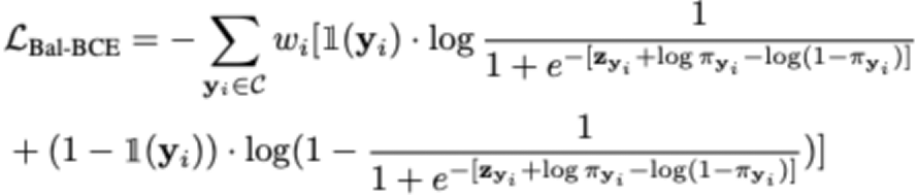
与之前的平衡交叉熵损失相比,本文的损失函数在视觉 Transformer 模型上展现出更好的性能,并且具有更快的收敛速度。研究中的理论推导为损失函数的合理性提供了严密的解释,进一步加强了我们方法的可靠性和有效性。
总结**
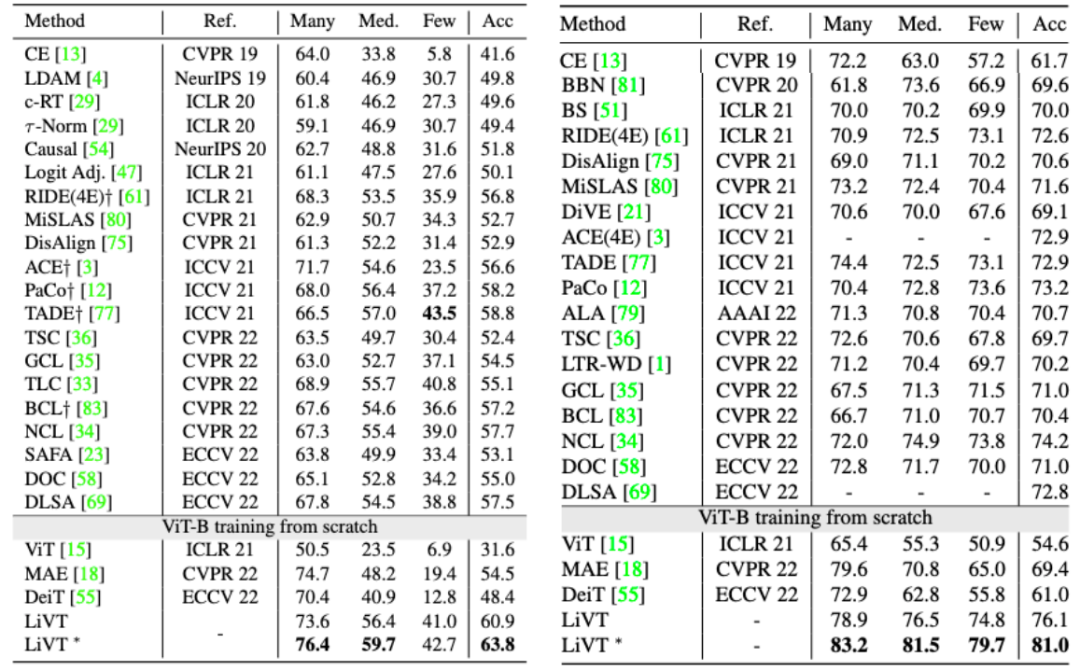
**本文提供了一种新的基于视觉 Transformer 处理不平衡数据的方法 LiVT。LiVT 利用掩码建模和平衡微调两个阶段的训练策略,使得视觉 Transformer 能够更好地适应长尾数据分布并学习到更通用的特征表示。该方法不仅在实验中取得了显著的性能提升,而且无需额外的数据,具有实际应用的可行性。 论文的更多细节请参考论文原文和补充材料。