【泡泡一分钟】基于CNN特征的SeqSLAM闭环实时性检测
每天一分钟,带你读遍机器人顶级会议文章
标题:CNN Feature boosted SeqSLAM for Real-Time Loop Closure Detection
作者:Dongdong Bai,Chaoqun Wang,Bo Zhang,Xiaodong Yi Xuejun Yang
来源:arXiv 2017
播音员:四姑娘
编译: 刘彤宇
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文使用了两个数据集——Nordland数据集和Gardens Point数据集,分别从季节变化和阳光变化对环境的影响测试算法的实用性。该CNN模型是一个多层神经网络,主要由五个卷积层,三个最大池层和三个完全连接层组成。 最大池层仅遵循第一,第二和第五卷积层,但不遵循第三和第四卷积层。 该架构如图所示。
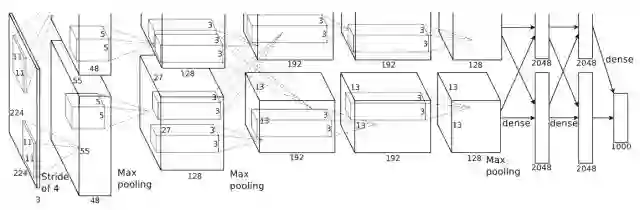
图示 Places-CNN/AlexNet模型的架构

Abstract
Loop closure detection (LCD) is an indispensable part of simultaneous localization and mapping systems (SLAM); it enables robots to produce a consistent map by recognizing previously visited places. When robots operate over extended periods, robustness to viewpoint and condition changes as well as satisfactory real-time performance become essential requirements for a practical LCD system.
This paper presents an approach to directly utilize the outputs at the intermediate layer of a pre-trained convolutional neural network (CNN) as image descriptors. The matching location is determined by matching the image sequences through a method called SeqCNNSLAM. The utility of SeqCNNSLAM is comprehensively evaluated in terms of viewpoint and condition invariance. Experiments show that SeqCNNSLAM outperforms state-of-the-art LCD systems, such as SeqSLAM and Change Removal, in most cases. To allow for the real-time performance of SeqCNNSLAM, an acceleration method, A-SeqCNNSLAM, is established. This method exploits the location relationship between the matching images of adjacent images to reduce the matching range of the current image. Results demonstrate that acceleration of 4-6 is achieved with minimal accuracy degradation, and the method’s runtime satisfies the real-time demand. To extend the applicability of A-SeqCNNSLAM to new environments, a method calledSeqCNN-SLAM is established for the online adjustment of the parameters of SeqCNNSLAM.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





