

人类飞行员和无人驾驶飞行器在有人-无人团队合作(MUM-T)中共同实现军事目标。在飞机驾驶舱内,飞行员与无人系统之间的互动究竟是怎样的,这仍然是一个未决问题。在大多数方法中,无人平台由飞行员授权,飞行员负责监控衍生行动(Miller 等人,2005 年;Uhrmann 和 Schulte,2012 年;Doherty、Heintz 和 Kvarnström,2013 年)。在现代空战中,战术形势可能在几分钟甚至几秒钟内发生变化,需要飞行员调整计划。当飞行员除了自己的飞机外,还要负责引导多架无人驾驶飞机时,计划修正的时间压力将非常大。当技术进步(如通过决策支持系统和自动任务执行)提高决策时间时,这种压力将进一步加剧。
为了加快决策速度,可能会赋予自动化更多的权力,或者采用数据驱动的方法。然而,当权力转移到自动化和决策转移到无法解读的算法中时,飞行员是否仍能进行有意义的控制尚不清楚(Lepri, Staiano, Sangokoya, Letouzé, & Oliver, 2017; Parasuraman, Sheridan, & Wickens, 2000)。
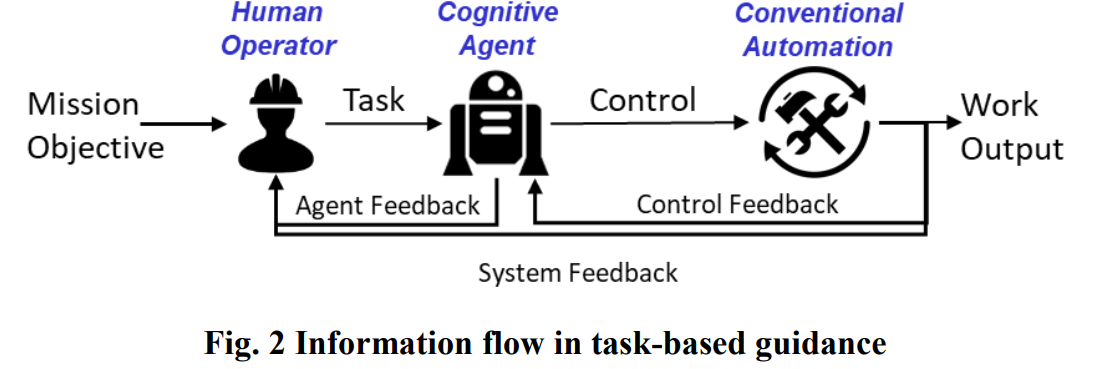
因此,本文讨论在高度动态的军事环境中对无人飞行器进行有意义控制的要求。将讨论任务的制定作为人类与自动化之间达成共识的一种手段,以及对任务委托、无人飞行器处理方法和无人飞行器反馈的要求。
成为VIP会员查看完整内容
相关内容

Arxiv
0+阅读 · 2024年10月5日
Arxiv
0+阅读 · 2024年10月4日
Arxiv
223+阅读 · 2023年4月7日
Arxiv
89+阅读 · 2021年10月21日

相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2024年10月5日
Arxiv
0+阅读 · 2024年10月4日
Arxiv
223+阅读 · 2023年4月7日
Arxiv
89+阅读 · 2021年10月21日