
近年来,未经授权的无人驾驶飞行器(UAV)所造成的危险已大大增加,因此,至少需要采取适当的探测、跟踪和反制措施来消除这种威胁。除了射频干扰器、全球定位系统欺骗、高压激光、电磁脉冲和射弹枪之外,反无人驾驶航空系统(cUAS)也是对付未经授权的小型无人驾驶飞行器的一种非常高效和有效的对策。
本文介绍的 cUAS 是一种全自动、多功能、可移动部署的系统,能够利用气压驱动的网状发射器拦截市场上几乎所有的小型无人机。与上述替代方案相比,所开发的 cUAS 不受未经授权的小型无人机操作模式的影响,即手动或自动控制,甚至不受全球导航卫星系统或射频的影响。我们的多传感器方法(照相机、激光雷达和雷达传感器)以及所实施的算法使 cUAS 能够在各种环境下运行,如开放式机场、军用场地和城市空间,在这些环境下,许多雷达反射通常会阻碍对小型物体的探测和跟踪。cUAS 可独立接近、跟踪和/或拦截速度高达 20 米/秒的已识别无人机,成功率超过 90%。
本文对 cUAS 原型机的性能进行了演示和评估。对小型无人机的拦截能力和狗斗性能进行了测试和研究。此外,我们还概述了该系统的具体攻击和防御策略,以及从最初的探测和分类到最终拦截和清除未授权无人机的过程阶段特征,并说明了所开发的多传感器平台相对于现有单传感器系统的优势。

图 1:地面探测与控制站(左)和拦截无人机系统(右)的硬件组件[产品图片来自相关制造商]。
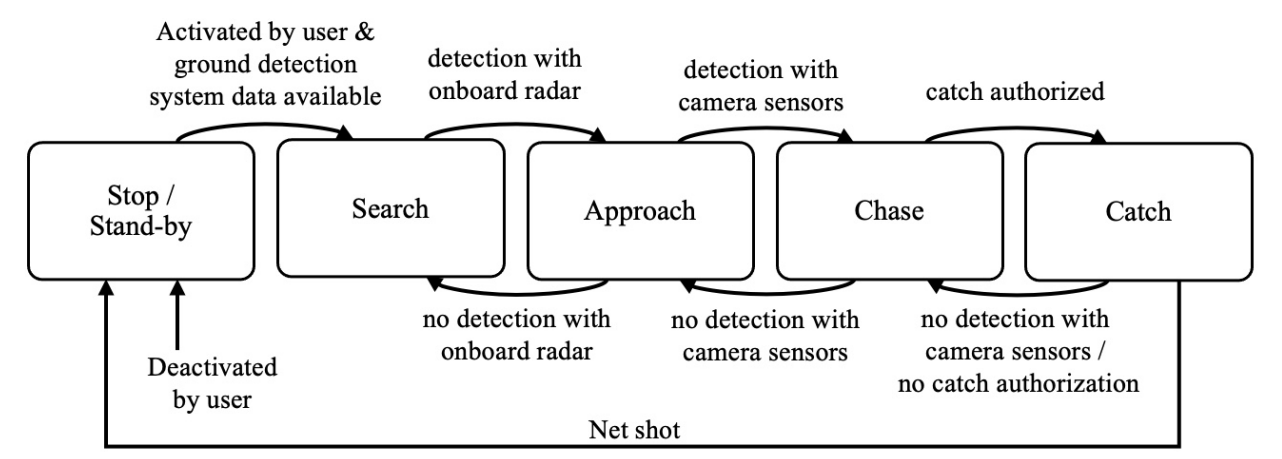
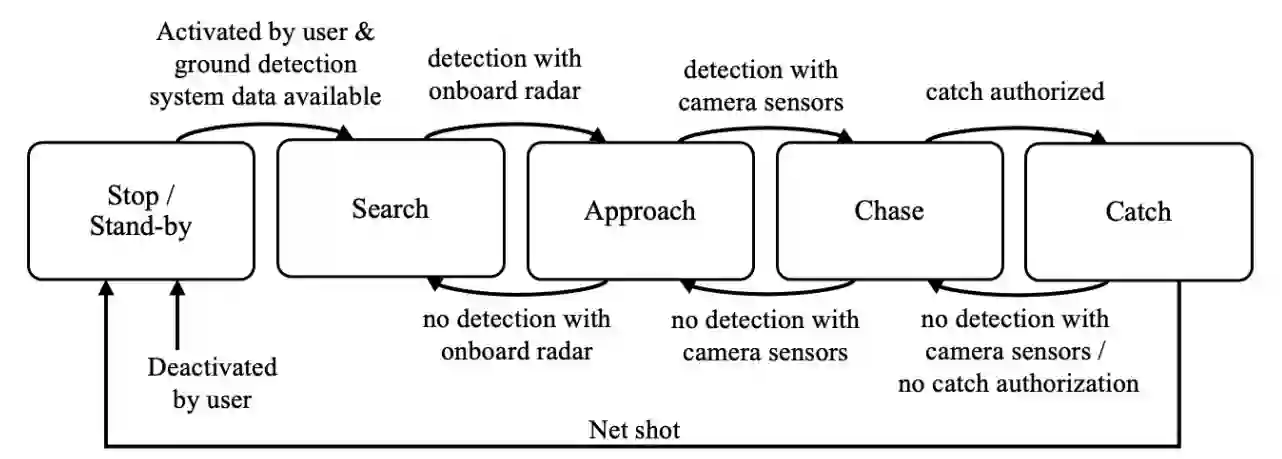
图 3:拦截过程的各个阶段及其条件。
成为VIP会员查看完整内容

相关内容

Arxiv
224+阅读 · 2023年4月7日
相关VIP内容
相关资讯
相关论文
Arxiv
224+阅读 · 2023年4月7日