
无人机技术的最新发展导致了无人驾驶飞行器(UAV)的广泛使用。特别是,无人飞行器经常用于侦察,以探测大面积区域内的失踪人员等物体。然而,传统系统仅使用一架无人飞行器在大面积区域内搜寻失踪人员。此外,由于探测需要较高的计算能力,因此需要在飞行后或手动进行物体探测。本文提出了一种使用多架无人机的无人机侦察系统。所提议的多无人机侦察系统在每个无人机上执行实时目标检测。地面控制系统(GCS)接收每架无人机的实时目标检测结果,并对图像进行拼接。为了实现单个无人机的实时目标检测,YOLOv5 模型采用了滤波器剪枝方法,与现有的基线模型相比,该模型使用的参数减少了 40%。轻量级 YOLOv5 模型在使用任务计算机的 Jetson Xaiver NX 上实现了约 11.73 FPS 的速度。此外,所提出的图像拼接方法可利用无人机生成的附加信息有效匹配特征,从而实现图像拼接。无人机飞行测试表明,拟议的侦察系统可以在大面积区域内实时监控和检测目标。
随着近年来无人机技术的发展,无人机现已被广泛应用于各种领域,例如人类难以直接搜索和分析的大型危险区域的侦察系统。人工智能的进步极大地提高了物体探测技术,可以发现人或汽车。然而,由于大多数任务都是由单架无人机执行,因此作业范围和时间都受到限制。此外,由于无人驾驶飞行器(UAV)的性能限制,很难实时探测物体,因此无法立即做出反应。这些限制激发了对使用多架无人机进行蜂群飞行的研究,通过划分大面积区域来执行任务,并通过为无人机分配不同的任务来实现合作。
蜂群侦察系统需要一个能同时控制和管理多架无人机的蜂群操作系统。在该系统的基础上,还需要一种图像拼接算法,将无人机接收到的图像进行同步处理,并合并成一张匹配的图像。整合后的图像可帮助用户有效了解整体情况并做出决策。然后,需要一种实时物体检测算法来检测失踪人员或入侵者。在物体检测方面,已经使用了深度学习算法。然而,由于其计算成本较高,处理过程需要在无人机外部进行或作为后处理。
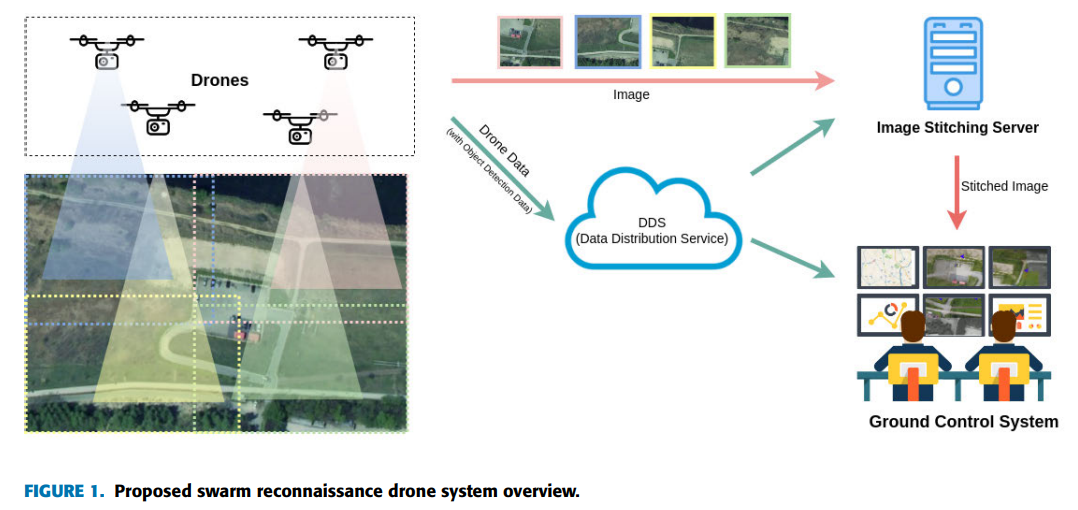
本文提出了一种基于数据分布服务的蜂群侦察无人机系统,如图 1 所示,该系统使用安全的集成指令同时控制和操作多架无人机。所提出的系统接收来自每架无人机的独立图像,并对图像进行拼接,同时实时检测无人机内的物体。因此,地面控制系统(GCS)可实时提供全面的态势感知。通过基于无人机获取的拼接图像的目标检测测试,对所提出的系统进行了验证。
本文的主要贡献可归纳如下:
-
提出了一种基于无人机图像的实时目标检测方法。以每秒处理 10 帧(fps)为目标,设计了一个拟议的蜂群侦察无人机系统,用于执行实时目标检测。为了在无人机使用的 Jetson Xavier NX 系统中达到 10 帧/秒的要求,提出了针对轻量级网络的滤波器剪枝方法,以实现物体检测性能。
-
为蜂群无人机系统提出了实时图像拼接方法。提出的图像拼接方法利用无人机产生的附加信息有效地匹配特征。
-
对无人机进行飞行实验,以验证所提方法的可行性。
本文其余部分的结构如下。第二节介绍了无人机群系统和无人机图像目标检测的相关研究。第三节介绍了拟议的具有空中图像拼接和实时目标检测功能的蜂群侦察无人机系统的总体结构。第四节简要介绍了实验装置和结果。第五节讨论本文的结论。

