
能够支持以任务为中心的网络战争的雾计算架构在这项工作中为战术云提供了框架。战术云从战场上的雾节点(FNs)转发的信息中了解战争的情况。这项工作旨在通过保持战术边缘的战场上的FNs的运行效率来维持FNs网络。所提出的解决方案通过雾服务器(FS)上的FN,利用长短期记忆模型监测和预测FN可能的超载。本文还提出了随机任务调度(RTS)算法,通过抢占FN的任务并将其调度到另一个FN,来避免FN可能出现的超载。实验结果表明,具有线性复杂性的RTS的可调度性措施比其他基础调度算法高8%-26%。实验结果表明,与其他时间序列预测模型相比,LSTM模型的平均绝对误差较低。
关键词:战术云;网络中心战;雾计算;雾节点;随机化任务调度;长短期记忆
战术云架构
图1阐述了战术云的架构。图1(a)提供了部队的部署。随后,FNs、FSs和C2被相应地部署在战场上,形成战术云,如图1(b)所示。图1(c)显示了战术云的功能结构,呈分层形式。
战术云主要是一个3层系统,各层是:
(i) 战术边缘。它是最底层的一层,包括传感器、数据收集设备和部署在战场上的武器系统的分解网络。
(ii) 雾层。FNs、伙伴FNs和FSs构成雾层,将战术边缘与C2和防御云连接起来。
(iii) 战术云。它构成了作战部队的C2,与行动点保持着安全距离。相关数据通过雾层从战术边缘实时到达战术云。
(iv) 国防云。最重要的是国防部拥有的集中式云,用于各部门、部队和国防活动的协作和协调。
C2利用战略模型决定传感器的类型、数量和在战场上的初始部署。这个模型为FN在战场上的分布提供了布局,以便它们在其范围内最佳地覆盖传感器。战场情况的了解取决于新生力量对传感器的覆盖和控制。C2将一个明确界定的区域内的新生力量的权力和控制权分配给了FS。C2通过FS控制和指挥FNs。
FS为部署的每个FN灌输一个称为伙伴FN的工人主机,并将它们配对。FN向其伙伴FN更新其状态。伙伴FN拥有其配对FN的图像。FN是脆弱的,伙伴FN充当其FN对的备份。在一个FN丢失或损坏的情况下,FS用一个新的FN替换它,使用来自其伙伴FN的虚拟图像的副本。FS通过其FN来管理FN。
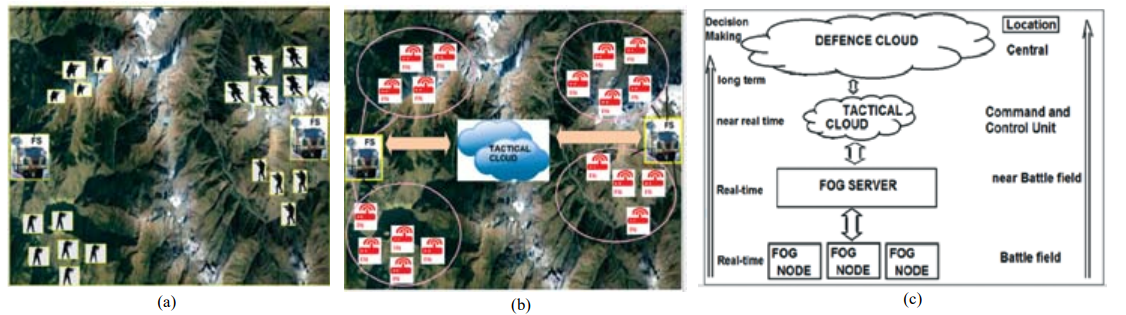
图 1. 战术云架构:(a) 部队部署,(b) 战术云部署,(c) 战术云层次结构。
