PolarMask: 一阶段实例分割新思路
加入极市专业CV交流群,与6000+来自腾讯,华为,百度,北大,清华,中科院等名企名校视觉开发者互动交流!更有机会与李开复老师等大牛群内互动!
同时提供每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流。关注 极市平台 公众号 ,回复 加群,立刻申请入群~
作者:谢恩泽
来源:https://zhuanlan.zhihu.com/p/84890413
本文已经作者授权,未经许可不得二次转载
今天介绍一下我们的PolarMask, 一种single shot的实例分割框架,文章在https://arxiv.org/abs/1909.13226 ,代码最近在整理中,即将在https://github.com/xieenze/PolarMask 开源,请大家多多关注。
PolarMask基于FCOS,把实例分割统一到了FCN的框架下。在4月份FCOS挂出来之后,我和沈老师就一直在讨论如何进把instance segmentation融合进FCN里。FCOS本质上是一种FCN的dense prediction的检测框架,可以在性能上不输anchor based的目标检测方法,让行业看到了anchor free方法的潜力。接下来要解决的问题是实例分割。
这个工作我个人觉得最大的贡献在于,把更复杂的实例分割问题,转化成在网络设计和计算量复杂度上和物体检测一样复杂的任务,把对实例分割的建模变得简单和高效。
Mask R-CNN
首先回顾一下之前最经典的实例分割方法,‘先检测再分割’,在这方面做到极致的算法是Mask RCNN。
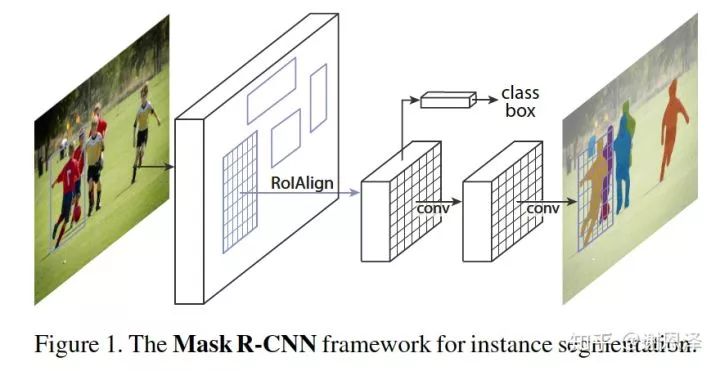
Mask R-CNN属于基于两阶段的检测算法,在检测框的基础上进行像素级的语义分割,简化了实例分割的难度,同时取得了stoa的性能,在'先检测再分割’ 这一范式上做到了极致。
PolarMask
我们的PolarMask提出了一种新的instance segmentation建模方式,通过寻找物体的contour建模,提供了一种新的方法供大家选择。
两种实例分割的建模方式
1、像素级建模 类似于图b,在检测框中对每个pixel分类
2、轮廓建模 类似于图c和图d,其中,图c是基于直角坐标系建模轮廓,图d是基于极坐标系建模轮廓
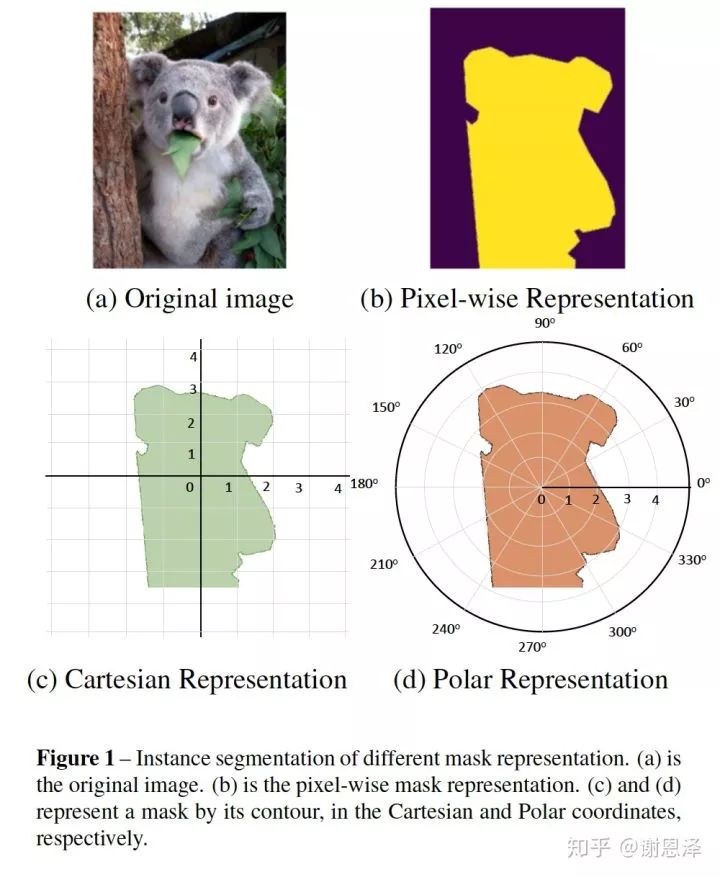
可以看到Mask R-CNN属于第一种建模方式,而我们提出的PolarMask属于图d建模方式。图c也会work,但是相比图d缺乏固定角度先验。换句话说,基于极坐标系的方式已经将固定角度设为先验,网络只需回归固定角度的长度即可,简化了问题的难度。
PolarMask 基于极坐标系建模轮廓,把实例分割问题转化为实例中心点分类(instance center classification)问题和密集距离回归(dense distance regression)问题。同时,我们还提出了两个有效的方法,用来优化high-quality正样本采样和dense distance regression的损失函数优化,分别是Polar CenterNess和 Polar IoU Loss。没有使用任何trick(多尺度训练,延长训练时间等),PolarMask 在ResNext 101的配置下 在coco test-dev上取得了32.9的mAP。这是首次,我们证明了更复杂的实例分割问题,可以在网络设计和计算复杂度上,和anchor free物体检测一样简单。我们希望PolarMask可以成为一个简单且强有效的single shot instance segmentation 的baseline。
PolarMask最重要的特点是:
(1) anchor free and bbox free,不需要出检测框
(2) fully convolutional network, 相比FCOS把4根射线散发到36根射线,将instance segmentation和object detection用同一种建模方式来表达。
我们选取FCOS嵌入我们的方法,主要是为了simple。FCOS是目前state-of-the-art的anchor-free检测器,并且十分simple。我们在FCOS的基础上,几乎不加任何计算量,就可以建模实例分割问题,并取得competitive的性能,证明了实例分割可以简化成和目标检测相同复杂的问题。
此外,FCOS可以看成PolarMask的特殊形式,而PolarMask可以看作FCOS的通用形式,因为bbox本质上是最简单的Mask,只有0,90,180,270四个角度回归长度。我们首次将instance segmentation和object detection用同一种建模方式来表达。
网络结构
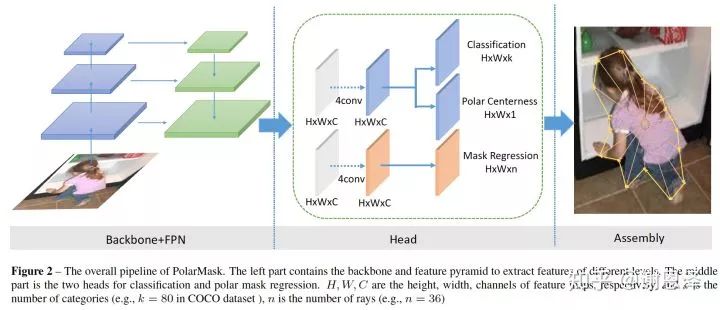
整个网络和FCOS一样简单,首先是标准的backbone + fpn模型,其次是head部分,我们把fcos的bbox分支替换为mask分支,仅仅是把channel=4替换为channel=n, 这里n=36,相当于36根射线的长度。同时我们提出了一种新的Polar Centerness 用来替换FCOS的bbox centerness。
可以看到,在网络复杂度上,PolarMask和FCOS并无明显差别。
Polar Segmentation建模
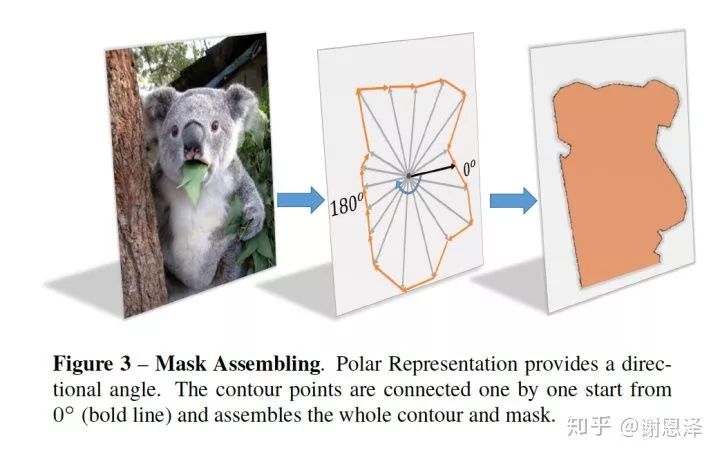
首先,输入一张原图,经过网络可以得到中心点的位置和n(n=36 is best in our setting)根射线的距离,其次,根据角度和长度计算出轮廓上的这些点的坐标,从0°开始连接这些点,最后把联通区域内的区域当做实例分割的结果。
在实验中,我们以重心为基准,assign到feature map上,会在重心周围采样,作为正样本,别的地方当做负样本,训练方式和FCOS保持一致,采用Focal Loss, 在此,我们提出Polar CenterNess,用来选择出高质量的正样本,给低质量的正样本降低权重。
Polar CenterNess
如何在Polar Coordinate下定义高质量的正样本?我们通过如下公式定义
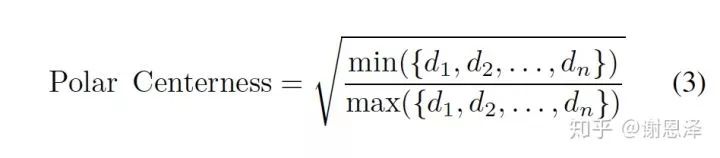
其中 d1 d2....dn指的是36根射线的长度,最好的正样本必须具备dmin ——> dmax.
用一张图举例
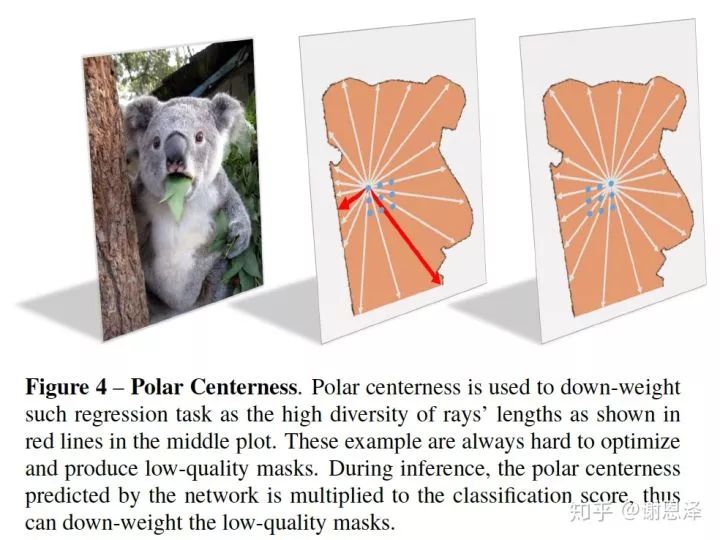
以看到中间的图,会出现长度回归差别很大的问题,而右边的图中心点位置就较为合适,到所有轮廓的长度回归就较为接近,36根射线的距离会比较均衡。Polar Centerness 可以给右边图的点较高的centerness分数,给中间图的点降低centerness分数,这样在infernece的时候右边图的点分数较高。
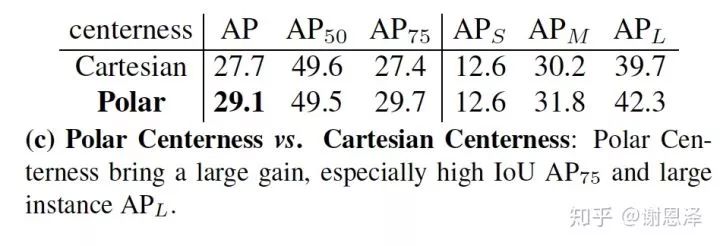
根据消融实验,Polar Centerness可以有效提高1.4的性能,同时不增加网络复杂度。结果如下图所展示
polar loU Loss
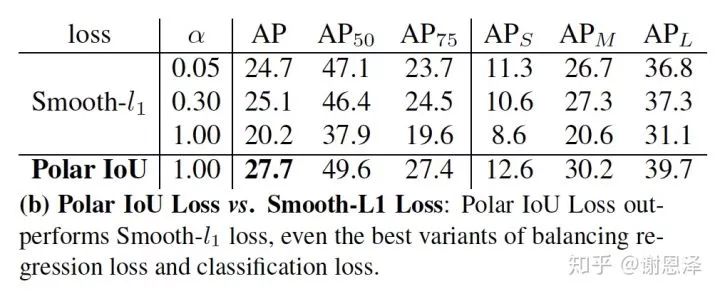
在PolarMask中,需要回归k(k=36)根射线的距离,这相比目标检测更为复杂,如何监督regression branch是一个问题。我们提出Polar IoU Loss近似计算出predict mask和gt mask的iou,通过Iou Loss 更好的优化mask的回归。通过实验证明,Polar IoU Loss相比Smooth L1loss可以明显提高2.6个点,同时Smooth L1loss还面临和其他loss不均衡的问题,需要精心调整权重,这是十分低效的,Polar IoU loss不需要调整权重就可以使mask分支快速且稳定收敛。
那么,Polar IoU Loss如何计算呢?如下图所展示
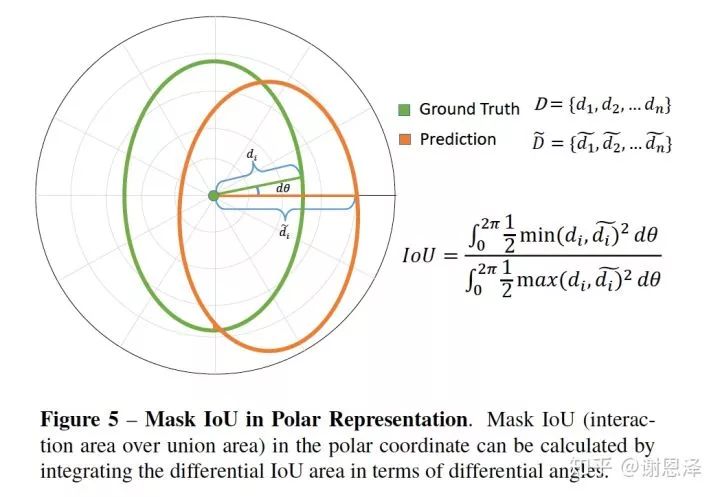
可以看到 两个mask的Iou可以简化为在dθ下的三角形面积iou问题并对无数个三角形求和,最终可以推倒到如下形式:
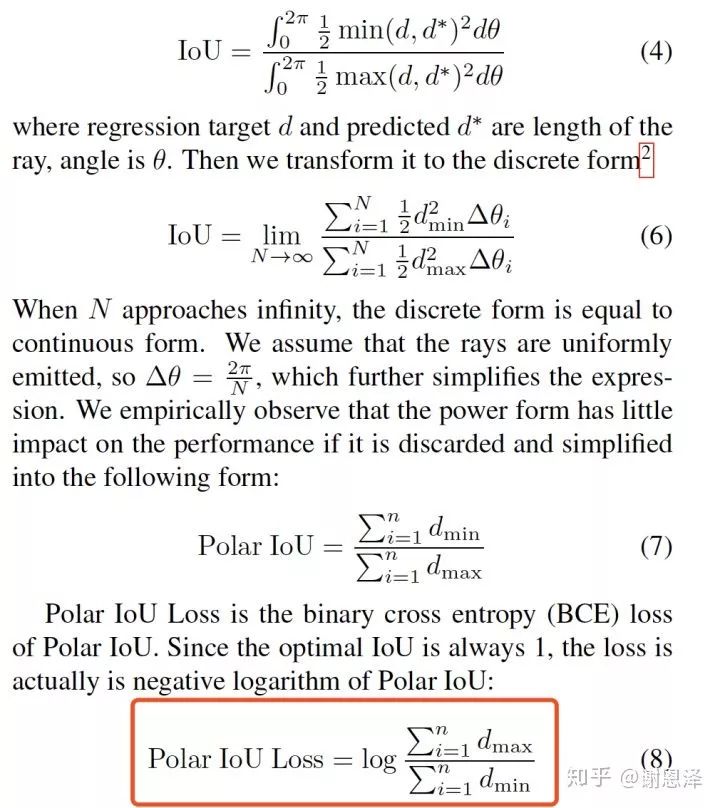
其实最终的表达形式十分简单,但是相比smooth l1的确可以不用调参并裸涨2.6个点。说明loss func的设计对于深度神经网络呢意义重大。结果如下所展示
我们在论文中还做了如下消融实验:射线数量的选择,加不加bbox branch, backbone以及尺寸和速度的trade off. 细节在论文中都有,不一一展开。
上限分析
看到这里,很多人心里都会有一个疑问,射线这种建模方式,对于凹的物体会有性能损失,上限达不到100mAP,PolarMask怎么处理这个问题?
答案是这样,PolarMask相比Mask R-CNN这种pixel建模的方法,对于形状特别奇怪的mask的确建模会失败,但是这并不代表polarmask毫无意义。原因有两个,(1)Mask R-CNN的上限也到不了100 mAP 因为有下采样这类操作使得信息损失。(2)不管Mask R-CNN还是PolarMask,他们的实际性能距离100mAP的上限都特别远。
所以我们目前应该关注如何让实际网络性能去更好地趋近于上限。
定量分析分析射线建模的上限:
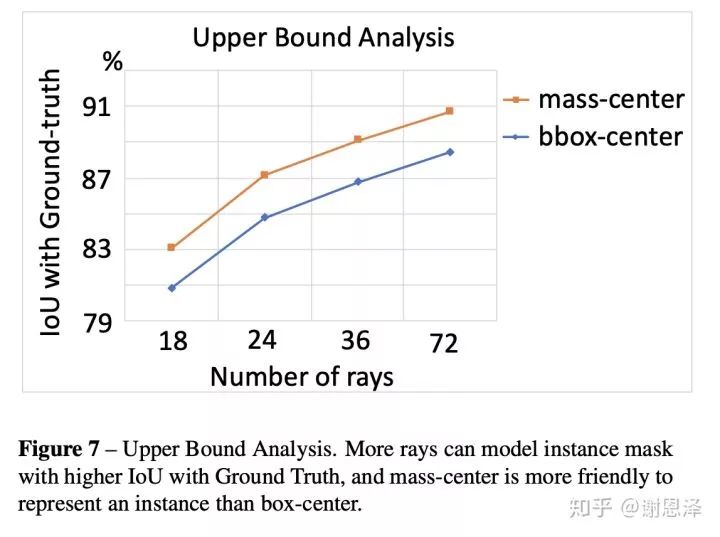
如图所示,当采用mass center做instance中心时,当射线数量不断提高,射线的gt和真实的gt的平均iou高达90%以上,这证明了对于射线建模的性能上限的忧虑还远远不需要担心。现阶段需要操心的问题是如何不断提高基于射线建模的网络性能。
实验
最终,配上一图一表展示一下相比sota的结果
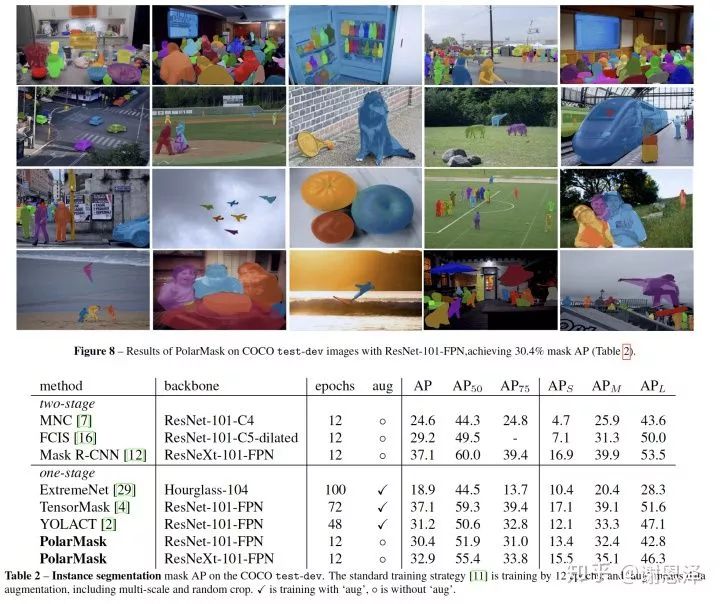
可以看到, 没用采用任何trick的情况下,PolarMask在resnext101-fpn的情况下,取得了32.9的配置,虽然不是stoa,但是也比较有竞争力。我们目前并没有采用很多常用的能涨点的trick,比如 ms train和longer training epochs。相比之下,别的one stage方法都不约而同的采用了mstrain和longer training epoches。我们会进一步改进,争取再提高性能。
后记
我们会尽快完善并放出带多尺度训练和增长训练时间的代码和模型,以提供给大家并和上述模型公平比较,做instance segmentation非常费卡和时间,希望大家理解。
一些调参的碎碎念
这个工作在今年4月FCOS出来的同时,我和沈春华老师就在讨论如何进行FCOS进行single shot anchor free实例分割,以及在CVPR开会的时候,和文海,彦伟, 宋林等小伙伴就论证过contour regression的可行性,因为大家可以看出,anchor free 物体检测已经是大势所趋,下一个领域必然是anchor free实例分割,预测一下,再下一个领域是全景分割。在和沈老师这么多月的讨论中以及一次又一次实验的失败中,polarmask逐渐成型。最开始mask regression无数次无法收敛,写mask iou loss又复杂效果还不怎么好,直到某一天想出了polar iou loss。发现性能很好,不用调参,一把出结果。感觉平时做研究还是需要多思考,而不是盲目的做实验。同时,polar centerness也是我在旅游的过程中想到的,然后立马找了个咖啡厅写代码调试,裸涨1.4个点。这两个方法在不增加计算量的情况下,充分发挥了polarmask的性能,看起来其实很简单,但是实际上是背后很多次思考和化简的结果。
总得来说,我最喜欢这篇文章就两点,
1、足够简单,不加任何trick, 也没有任何复杂的操作,比如deformable conv和roi align操作,有希望在工业界大规模应用;
2、找到了一种表达方式,把bbox detection和mask segmentation统一了起来,和FCOS是一种传承的工作,FCOS理论上可以看成PolarMask的特殊版,而PolarMask是FCOS的泛化版,因为bbox本质上是最简单的Mask。PolarMask本质上可以看成一个目标检测和实例分割统一的框架。只需要简单修改就可以退化到FCOS。
-End-
*延伸阅读
图像分割交流群
添加极市小助手微信(ID : cv-mart),备注:研究方向-姓名-学校/公司-城市(如:目标检测-小极-北大-深圳),即可进群。(已经添加小助手的好友直接私信)

△长按添加极市小助手
其他方向如目标检测、目标跟踪、人脸、工业检测、医学影像、三维&SLAM等,也可扫码添加极市小助手拉你进群,更有每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流,一起来让思想之光照的更远吧~

△长按关注极市平台
觉得有用麻烦给个在看啦~


