
随着无人机在各种应用中的使用不断增加,与无人机在禁区内未经许可的操作相关的安全挑战也变得日益严峻。为了应对这些挑战,我们提出了一种新颖的自动和自主威胁管理方法,可检测无人机入侵并执行实时应对措施。该系统名为 BlueSwarm,它整合了传感器数据,实现了资源间的数据通信,并利用人工智能操作无人机群进行反击。这项工作在模拟和真实世界实验中得到了验证,证实了其探测、跟踪和解除威胁的能力。
拟议的反无人机系统集成了地面段和空中段。地面部分由一个地面控制站、一个地面雷达和一个用于远距离探测、分类和定位来袭威胁的 PTZ 摄像机组成。空中部分由五架无人机组成,每架无人机都嵌入了一个光电传感器和一个可部署的网,作为消除威胁的有效载荷。这些无人机以蜂群形式自主部署,拦截、跟踪、评估和消除入侵的无人机,同时保持人类操作员在环路中。每架无人机都由自己的智能体操作,与其他无人机和人类操作员协同工作。该系统具有可扩展性和适应性。地面传感器的数量、类型和在空间中的分布可根据需要和保护空间的配置进行调整。防御无人机的数量及其有效载荷也同样可以调整。该系统依靠机器学习技术来探测、跟踪和定位入侵者,并适应不断变化的威胁。
我们与相关专家合作,研究、设计并实施了不同的使用案例,以在模拟和实际演示中测试我们的系统。这些使用案例涉及多达五架敌方无人机的入侵,这些无人机表现出粗心、无知和犯罪的操作模式,在模拟中以独立个体或蜂群的形式演化,在实际演示中则有两架敌方无人机。
每次任务都分为四个不同阶段,确保从探测到解除威胁的过程精简高效:(i) 基于地面传感器的潜在威胁探测、分类和定位,(ii) 部署防御性无人机群,(iii) 将每架无人机分配给单个目标,(iv) 结合地面和嵌入式传感器跟踪入侵无人机并解除其威胁。在执行任务期间,空域被划分为特定区域。首先是划定的保护区,严禁任何未经授权的无人机活动。其次是缓冲区,任何入侵都会触发我们的系统做出反应,从而在到达保护区之前做出协调响应。
本研究提供了一个全面、适应性强、可扩展的解决方案,利用相关技术和程序实现协作自主,从而为推进安全措施以应对不断升级的无人机威胁做出了贡献。通过将我们的新组件与现有系统相结合,我们旨在降低风险,保护禁区免受未经授权的无人机活动的影响。这项研究是与主题专家合作开发的,有助于在北约科技界推动反无人机技术的发展。
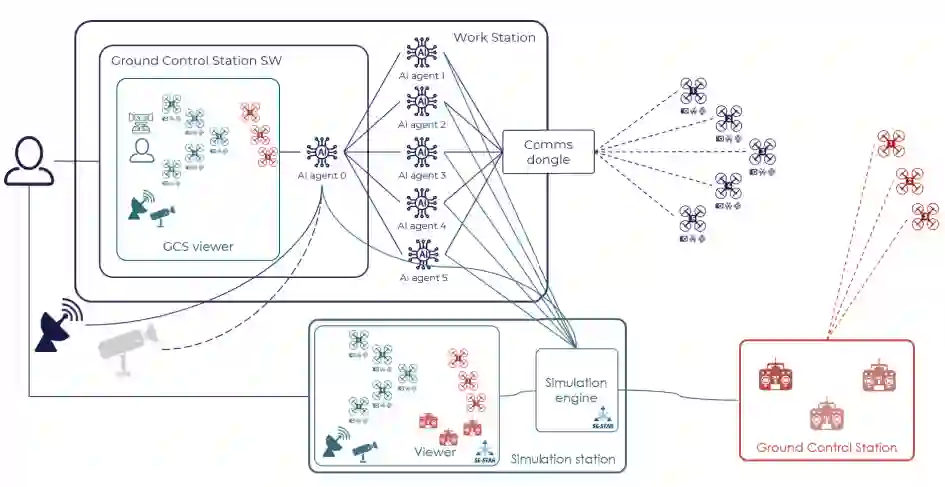
图 1:BlueSwarm 系统的高级架构。
在模拟和实际演示中,该系统集成了一个雷达、一个 PTZ 摄像机、一个由五架无人机组成的防御群、最多五架入侵无人机、每个防御群一个地面控制站(GCS)、每架防御无人机上的嵌入式摄像机和一个模拟站。每架无人机和地面控制站都通过各自的智能体进行操作。在真实世界的飞行演示中,还集成了其他组件,以符合现行的安全和法律标准(如手动无人机控制器或控制 STOP 操作系统)。现场操作人员包括技术人员、安全飞行观察员、飞行员和地面控制站操作员。
