海军乃至整个军队对自主系统的需求日益增长。无论是地面、空中、水面还是水下,无人系统(UxV)在军事领域的发展正逐步融入并将继续融入军事行动。为了保持与对手的竞争力,无人驾驶技术的研发对于保持领先优势至关重要。
随着传感器和处理能力的不断提高,部署自动驾驶汽车的能力也在不断增强。网络的发展使其变得更加强大和安全,电池技术的发展使其能够行驶得更远。海军在讨论自主航行器时,最常提及和研究的两个平台是无人机(UAV)和无人潜航器(UUV)。无人水面航行器(USV)是研发界日益关注的话题,更具体地说是无人水面航行器群。
USV 是一种在没有任何船员或工作人员的情况下在水体表面运行的航行器。由于其配备有可定制的有效载荷,因此可提供广泛的能力和服务。从商业到军事行动,其应用各不相同。在商业方面,应用包括气候监测、测深数据收集、近海石油和天然气管道维护以及水文测量。水文测量从多波束声纳读数中收集数据,多波束声纳利用声波和全球定位系统 (GPS) 数据测量海底和其他水道的深度。美国国家海洋和大气管理局(NOAA)依靠水文测量来绘制和更新海图。这些航海图为商业、军事和休闲航海者提供服务。它们向水手们告知浅海地貌和海岸线等航行危险。

图 1.1. 佐治亚州国王湾 - 商业拖船为田纳西号核动力战略导弹潜艇(SSBN 734)护航。
在海军应用方面,USV 可用于高价值资产的护航任务。在潜艇和水面作战领域,USV 可提供部队保护或引导船只进出港口。在舰队中,目前有美国海岸警卫队人员、水手或商业工人驾驶小型船只执行这项任务(图 1.1)。在港口附近较浅的水道中,由于受到吃水的限制,船只和潜艇的机动性和速度都受到了限制。如果潜艇在航行途中受到攻击,那么经过训练的部队保护车辆将承受攻击,以确保潜艇的安全(防止核反应堆受损和暴露)。USV 还可用于执行情报、监视和侦察 (ISR) 以及搜救行动。这些机器人具有机动性和灵活性,可根据手头的任务轻松更换有效载荷,从而实现广泛的用途。

图 1.2. 当美国海军约翰-斯滕尼斯号航空母舰(CVN 74)驶入华盛顿州埃弗雷特进行预定港口访问时,拖船为其护航。
使用 USV 船群的优势在于可以增加所需的搜索区域的广度。与一艘载人船只相比,多艘小型自动潜航器执行相同的任务集,还能节省时间、成本和能源。使用 USV 的另一个好处是保证船上人员的安全,而不是让他们冒险执行危险或耗时的任务。大约 80% 的海船事故是由人为错误、疲劳和/或分心造成的。通过使用多艘 USV 作为安全保障层,可以降低船只和船员发生碰撞或损坏的风险。与每次只使用一艘船相比,使用多艘 USV 可使操作员扩大范围、减少错误和/或缩短完成任务所需的时间。
为使 USV 能够执行这些任务,需要有一种程序能够指挥每艘航行器的速度和方位,同时对环境因素(如水流或风力)保持弹性。此外,与无人机或无人潜航器领域相比,USV 的研究进展并不多。
典型的海军舰队由不同的平台组成:航母、驱逐舰、巡洋舰甚至潜艇。随着海军生产更多大型和中型 USV,它们将慢慢融入常规舰队编队。随着中型和大型 USV 等多种型号的采购,对异构 USV 群的需求也将增加。美国国会研究服务部在一份关于海军大型无人水面和水下航行器的报告中指出:大型 USV 将补充海军的有人作战部队,以较低的采购和维护成本,降低水兵的风险,提高战备状态、能力和所需容量。虽然无人水面航行器是舰队单元的新成员,但 LUSV 将把坚固耐用、久经考验的商船规格与现有的军用有效载荷相结合,以快速、经济的方式扩大水面舰队的容量和能力。
海军未来实施的自主平台增加了与具有不同动态特性的 USV 群协同工作的机会。从一个点到另一个点时,需要一种能保持编队的稳健算法,各智能体之间的距离要固定。
问题陈述
本研究的目的是评估两种算法中哪一种能成功引导异构 USV 蜂群(由不同 USV 平台组成的编队)并保持理想的分离距离。不同的 USV 采用不同的动态特性和推进/转向模式。这些不同的特性关系到它们在每种算法下的表现。从本质上讲,异质蜂群比同质蜂群具有更低的协调水平。最终目标是修改和评估现有算法,以控制异质蜂群。
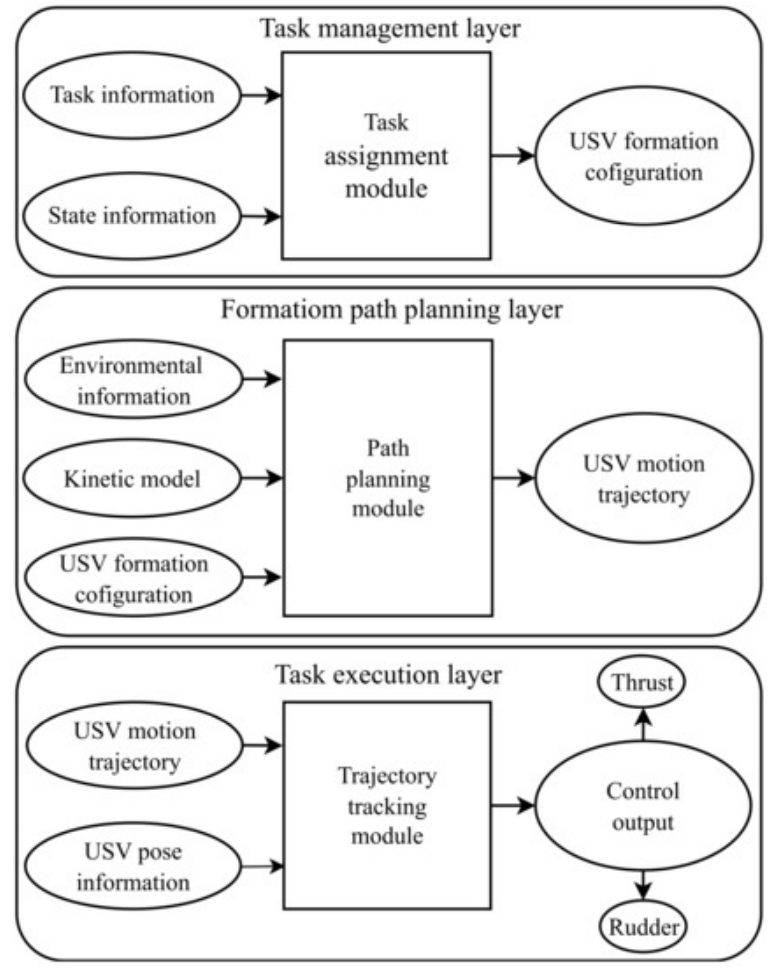
图 1.6. 无人水面航行器控制的分层软件任务基础设施。
研究贡献
目前,有关军事应用中异构 USV 编队的工作几乎没有。本文包括:
-
未来海军应用中的异构 USV 群: 随着海军不断生产多种变型 USV,对能够适应不同智能体动态的编队需求也在增加。这项研究探索了多种编队管理算法中的两种算法在异构虫群中的性能。
-
并列比较 USV 算法: 目前许多 USV 学术文章都只关注一种算法。本论文对两种不同类型的算法进行了比较,并将它们置于一个可以相互竞争的场景中。
-
联合自主工作:列出的算法是美国海军研究生院和美国海军学院创建并测试的算法。为了保持在自主研究方面的共同努力,本论文将在这两所院校之间架起一座桥梁。